新闻动态



2019年4月10日,在师生们的期待中,工研院学术系列讲座第二讲拉开序幕。本次讲座邀请了工研院青年研究员方虹斌,为大家带来了一场关于蚯蚓型移动机器人的精彩报告。
方虹斌博士现任复旦大学工程与应用技术研究院青年研究员,其博士毕业于同济大学。曾任香港理工大学博士后研究员(2017-2018)、美国密歇根大学博士后研究员(2015-2017)。主要研究方向为新型多功能智能结构和材料、非线性多体系统动力学、蠕虫型仿生移动机器人的结构-驱动-环境共融优化设计等,在Advanced Materials (I.F.: 21.950)、Physical Review Letter、Bioinspiration and Biomimetics、Physical Review E、ASME Journal of Applied Mechanics、Journal of Sound and Vibration等国际重要期刊上发表论文三十余篇,其中SCI论文24篇,论文总引用360余次(Google Scholar)。受邀在IUTAM Symposium--From Mechanical to Biological Systems:an Integrated Approach(2012,俄罗斯)、“软体机器人理论与技术”国际研讨会(2018,北京)、2018中国机器人学术年会(2018,武汉)做特邀报告。
在日益增强的非结构化环境中的作业需求,如野外搜救、管道检测、人体胃肠道检测等场景中,传统的腿式和轮式移动机器人无法有效工作,对于具有出色移动能力和环境适应能力的仿生机器人研发需求迫切。作为仿生学、机械超材料和动力学融合的成果,蚯蚓型移动机器人可在水平、垂直管道内高效移动,也能执行平面运动,提供了很好的解决方案,相关研究在最近几年取得了长足的发展。
本次讲座,方虹斌博士系统介绍了蚯蚓型移动机器人的仿生学设计以及Origami超材料的应用、机器人直线和平面运动的步态生成策略等研究成果。
方博士从机器人发展趋势和工程应用需求出发,提出在蚯蚓型移动机器人的设计当中需要解决的关键问题,即仿生学、动力学和超材料的有机融合;结合蚯蚓的形态学特征和运动机理研究,提出蚯蚓型复合拮抗机器人单元设计,研发蚯蚓型机器人通用步态生成器,并通过实验验证其在水平和垂直管道内执行高效移动的有效性。

蚯蚓型机器人仿生设计蚯蚓型移动机器人管道内测试
方博士强调,机器人的动力学分析是研究的重要环节。机器人在运动过程中,有可能会发生影响运动性能和定位精度的非理想粘滑(Stick-Slip)运动。传统的机器人运动学模型和运动学分析无法解释这些现象,这对机器人动力学建模和动力学分析提出了强烈的需求。
方博士将折纸原理和蚯蚓型机器人进行结合,研发基于折纸原理的Origami蚯蚓型移动机器人。Origami蚯蚓型移动机器人充分利用折纸结构的二维设计、二维成型、折叠拓扑切换、设计空间巨大、尺度无关等特性,呈现出出色的力学性能和移动性能。相比于传统机器人,Origami机器人质量/身长比明显降低,制造效率大幅提高,制作成本显著降低。其设计突破了现有局限,显著增强了机器人结构与作动的一体化协调程度,可作为未来机器人开发的重要参考。
报告最后,方博士还介绍了美国航空航天局(NASA)最近提出的折纸结构航天器和折纸结构火星车项目的进展情况,并就折纸结构的刚度问题、超材料的寿命问题以及未来软体机器人的发展趋势等问题与同学展开交流。
工研院徐鉴教授主持本场学术讲座。
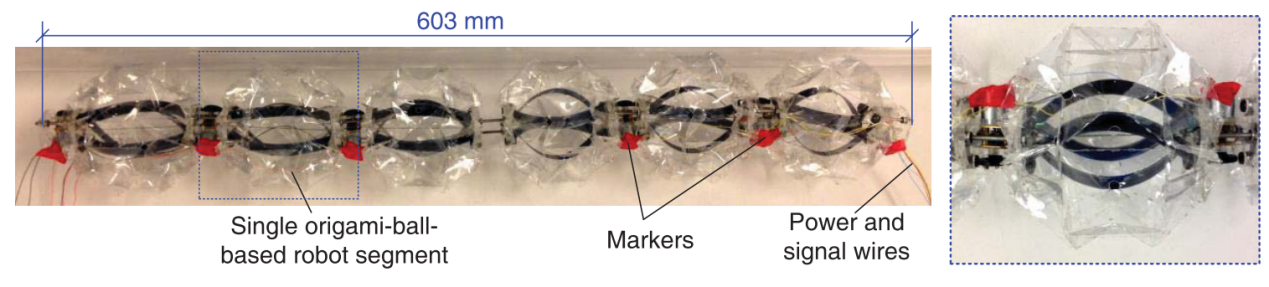
基于折纸结构的蚯蚓型机器人
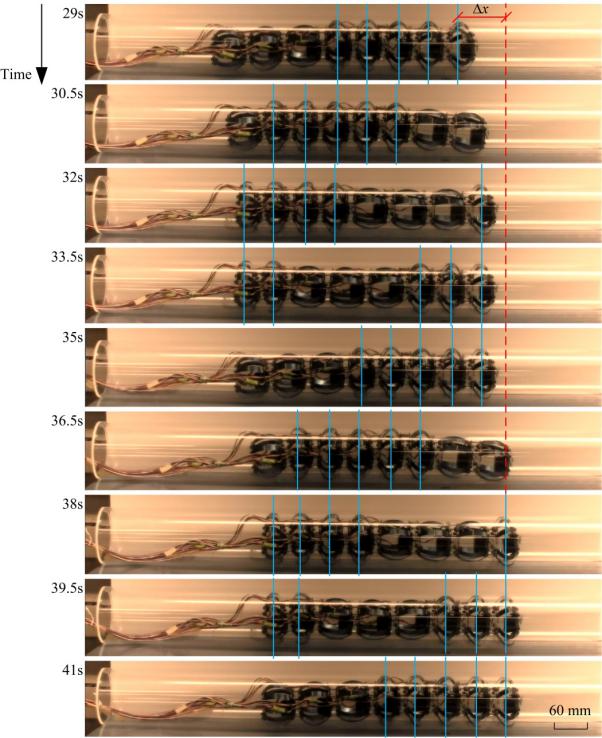
基于折纸结构的蚯蚓型机器人管道内测试
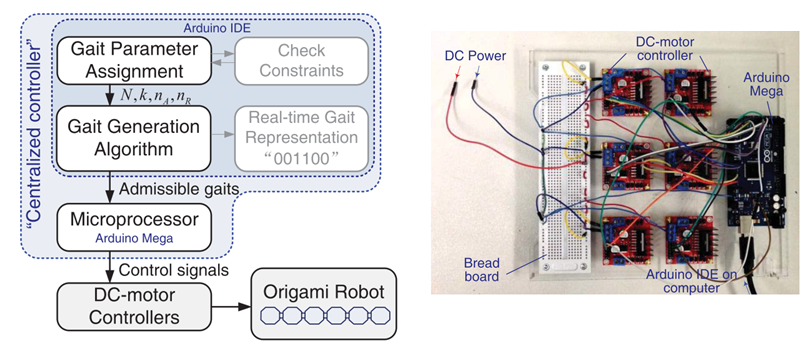
机器人步态控制架构和控制板


地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码