新闻动态



近日,复旦大学工程与应用技术研究院(以下简称“工研院”)仿生结构与机器人实验室(BSRL)在物理智能领域的最新研究成果——题为《Discriminative transition sequences of origami metamaterials for mechanologic》(折纸超材料差别性构型切换序列助力机械逻辑)的学术论文在智能系统领域的国际权威学术期刊《Advanced Intelligent Systems》上发表。复旦大学工研院为第一完成单位和通讯单位,博士后刘作林为论文第一作者,方虹斌青年研究员为通讯作者。该研究工作是以21年提出的多稳态SMOV(Stacked Miura-Ori Variant)超材料(发表于《Smart Materials and Structures》)为平台,在机械逻辑领域的首次探索。
论文简介
材料中的多稳态切换被用于各种功能和应用中,例如频谱带隙调节、冲击能量捕获和波导向。然而,无论是准静态切换还是动态切换,目前还没有对其有一个基本而全面的认识,特别是在切换序列的可预测性和调节机制方面。复旦大学工研院方虹斌青年研究员、刘作林博士、徐鉴教授与美国密歇根大学Kon-Well Wang教授合作,以具有多稳态可重构性的SMOV(Stacked Miura-Ori Variant)超材料为平台,揭示了准静态切换和动态切换的根本机制,获得了可编辑的准静态和动态构型切换图,并以此为基础实现了基本和复合机械逻辑门。该方法的多功能性体现在使用单个SMOV实现不同的复杂逻辑运算而不增加结构复杂度,展示了其独特的计算能力,为实现高效的物理智能提供了途径。
本文主要工作
折纸超材料的性质主要由折叠的几何参数和基底材料特性决定。本文首先详细研究了这些设计参数对SMOV超材料多稳态特性的影响,发现通过调节这些参数,单个SMOV胞元可以表现出1,4,6,7和8等不同的稳态构型个数(图1)。
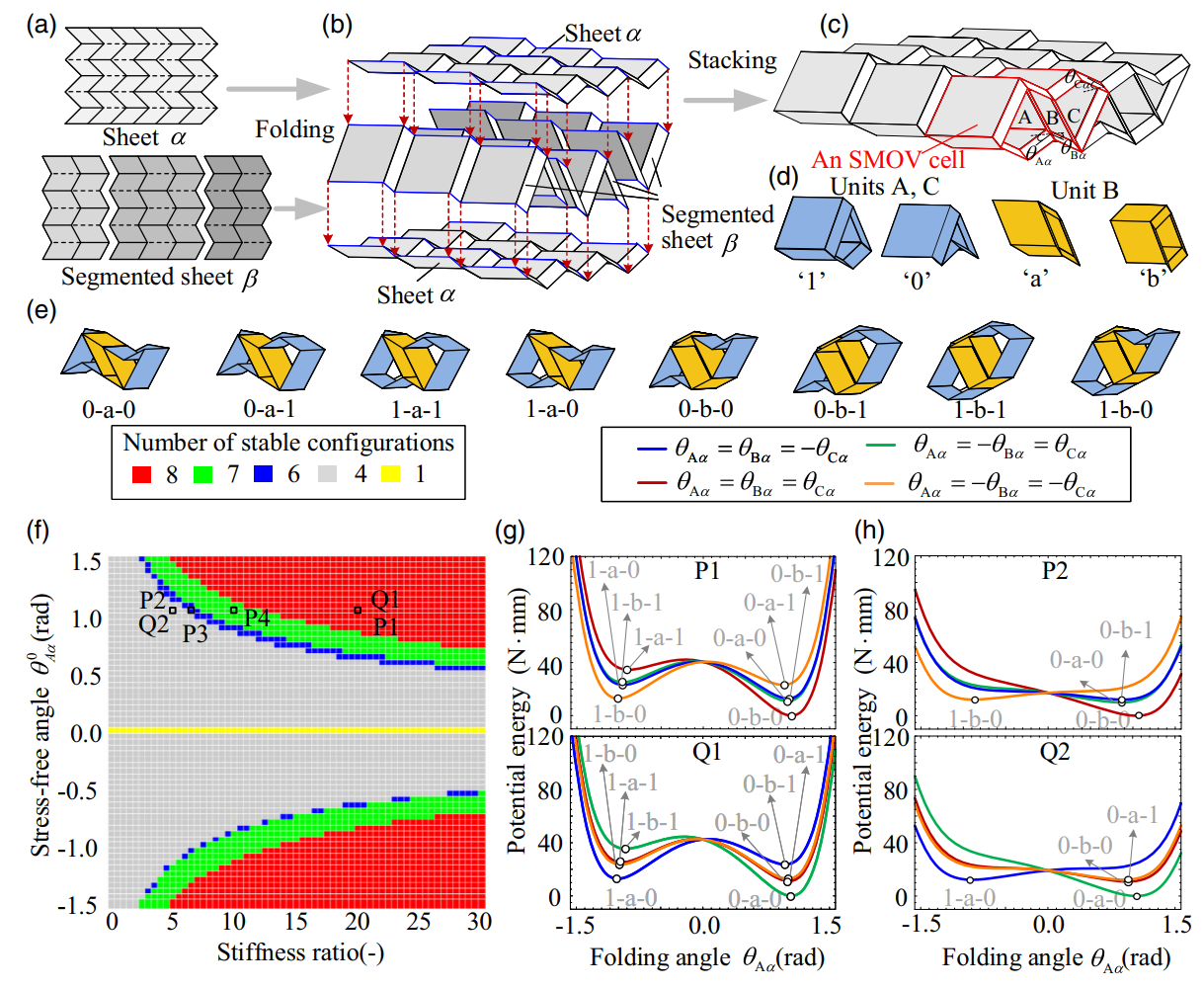
图1 SMOV超材料的构成和单元SMOV胞元的多稳态特性
根据刚性折叠理论,这些多稳态构型在切换路径上具有一个共同的临界状态,经过这个临界状态,结构的构型变得难以预测。为解决这一难题,我们考虑了结构的非刚性变形,并将其以额外的等效势能形式引入到模型中,实现了稳态构型切换序列的确定性预测,发现了可逆和非可逆的构型切换形式。将所有的构型切换序列组合在一起,我们得到了准静态切换图(图2)。通过调节结构参数,我们发现这些准静态切换图是可以被编辑的,其背后的编辑规律及力学机制也在文中被详细地给出。通过对SMOV实验原型进行准静态拉压测试,我们得到了与理论预测接近的切换图(图2),验证了理论的正确性和有效性。
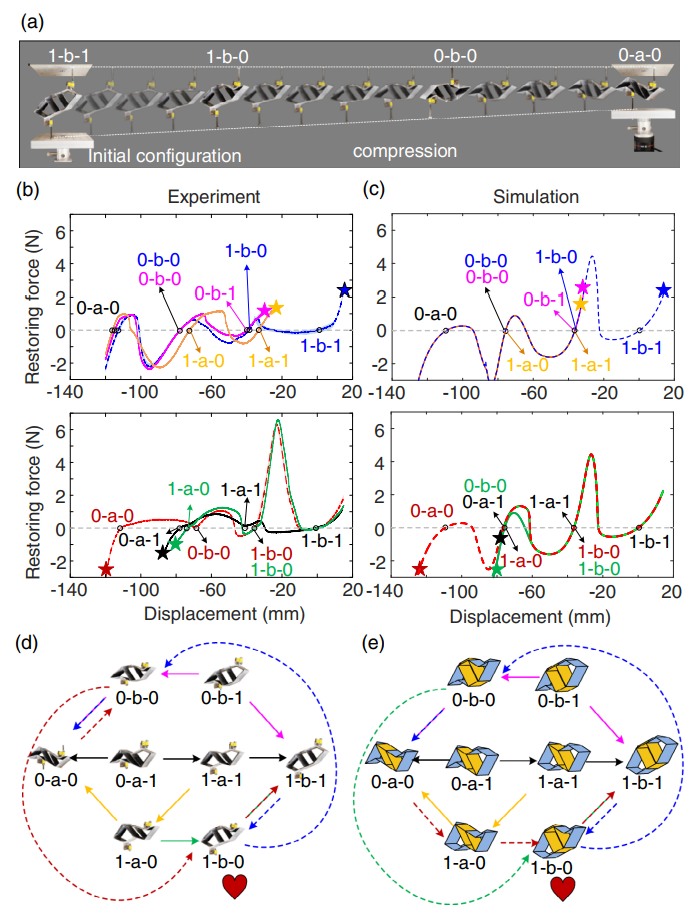
图2 SMOV胞元的准静态实验切换图和理论预测对比
注意到准静态切换图中不同稳态之间具有单向或双向的连接,这意味着某些构型可以很容易通过切换得到,而另一些构型则比较困难甚至难以被切换到。通过引入惯性力,我们得到了SMOV单胞的动力学模型,基于不同的激励频率和幅值,更加丰富的动力学切换序列被发现(图3)。与准静态不同的是,动力学激励可以实现任意两个稳态构型之间的切换,即其对应的动力学切换图是全连接的。
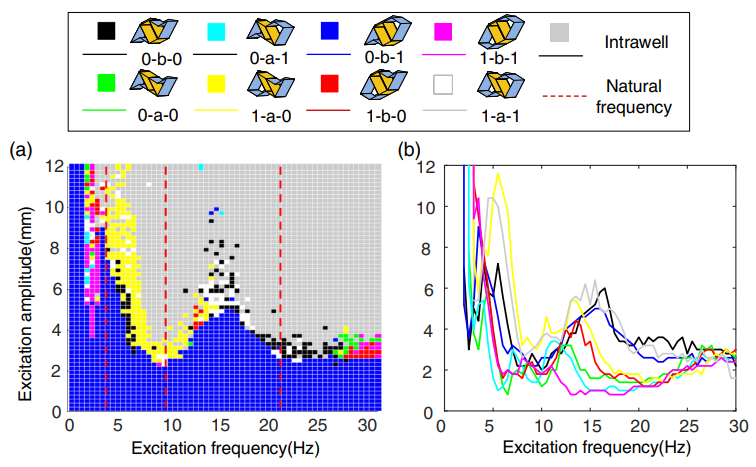
图3 SMOV胞元的动力学切换序列
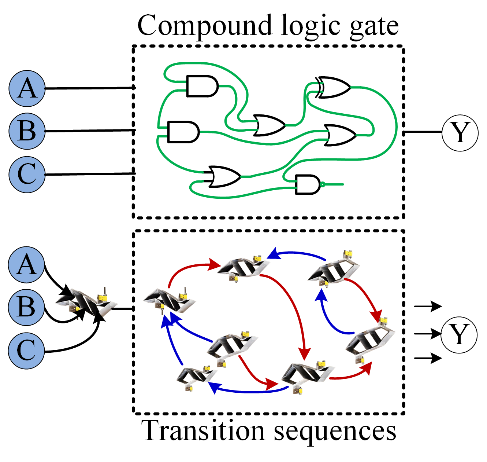
鉴于单个SMOV胞元具有如此丰富的准静态和动态切换序列,我们创新性地将其应用到了逻辑门的实现上。具体来说,我们首先建立了单个单元两个稳定构型和数字‘0’‘1’之间的对应关系,由此实现了机械比特。在此基础上利用发现的准静态或动态切换规则,实现对机械比特的调控。通过记录这些切换序列实现对输入数据的升维和非线性变换,再通过训练输出层的线性权重实现给定的逻辑门输出(图4),包括基本逻辑门,复合逻辑门以及全加器等。
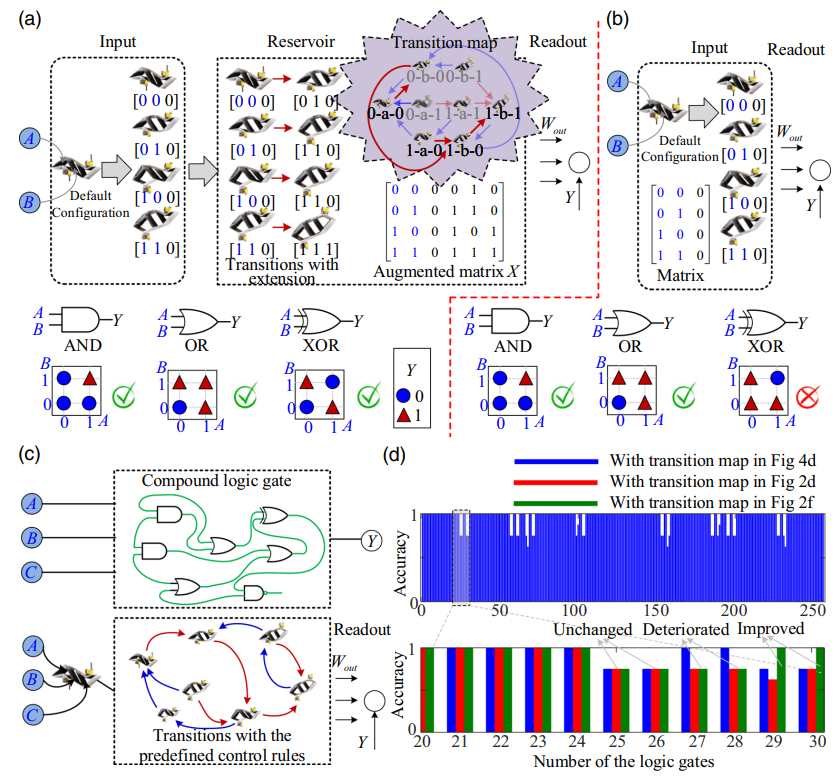
图4 基于SMOV单胞切换序列实现机械逻辑门
结论
本研究以具有多稳态可重构特性的SMOV折纸超材料为平台,揭示了多稳态构型切换路径的丰富性、可预测性、差别性、可逆/不可逆特征,并系统阐明了通过调节设计参数编辑构型切换图的可行性。研究还发现,动力学激励可以实现在任意两个稳定构型间的双向切换,从而构成了一个全连通的构型切换图。SMOV单元作为一种具有代表性的多稳态结构,为发展机械逻辑提供了一种全新框架。基于单个SMOV单元并以其准静态/动态切换作为物理储备池(physical reservoir),我们实现了基本和复杂的物理逻辑运算。该框架赋予了单个SMOV胞元实现不同逻辑运算的多功能性,大大降低了开发各种复合逻辑门的复杂度。得益于多稳态切换的非线性以及SMOV单元的可延拓和可堆叠性,我们有望通过构建多胞SMOV超材料实现更为复杂的物理计算。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/aisy.202200146
相关系列研究:https://iopscience.iop.org/article/10.1088/1361-665X/ac0d0f
延伸阅读:
仿生结构与机器人实验室(BSRL)隶属于复旦大学工程与应用技术研究院智能机器人研究院,由徐鉴教授和方虹斌青年研究员领导,主要研究方向为:
*具有超常规静力学、运动学和动力学性能的仿生结构和仿生机器人开发。
*基于可变结构和多驱动器的仿生多模态、模块化机器人的协同驱控。
*仿生移动机器人对可变工作环境的自适应与共融动力学。
*基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制。
*基于可变拓扑结构的仿生机械超材料力-光-电-声多场耦合动力学。
实验室围绕“仿生结构与机器人”这一主题开展了交叉创新研究,相关学术成果发表在Advanced Materials、IEEE Transactions、Journal of Sound and Vibration、《力学学报》等国内外顶级期刊与国际学术会议。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码