新闻动态



近日,复旦大学工程与应用技术研究院(以下简称“工研院”)仿生结构与机器人实验室(BSRL)在智能大腿假肢领域的最新研究成果——题为《Bilateral Constrained Control for Prosthesis Walking on Stochastically Uneven Terrain》(假肢在随机不平坦地形上行走的双边约束控制)的学术论文在国际学术期刊《International Journal of Mechanical Sciences》(中科院工程技术1区TOP,JCR Q1)上发表。复旦大学工研院为第一完成单位和通讯单位,第一作者为徐鉴教授指导的2019级博士生马鑫,张晓旭副教授为通讯作者。这也是BSRL继去年在《IJMS》发表相关工作以来,再次在此研究方向获得的系列研究成果。
论文简介
智能大腿假肢是帮助下肢残疾人恢复运动功能、实现行为重建的重要辅具。近年来,智能假肢在机器人及其控制领域得到了广泛的研究,帮助截肢患者在结构化环境中的实现了行走功能,如上下楼梯、平路跑步等(如应用场景图)。然而,对沙地等,这类随机不平坦地形,现有控制方法仍面临严重的状态约束和稳定性问题,包括受随机地面接触力扰动的系统模型不确定和系统状态约束未知,以及传统控制方法无法保证受约束人-机交互随机系统稳定性等。复旦大学工研院徐鉴教授团队,张晓旭副教授、马鑫同学提出了双侧约束自适应神经网络控制方案(Bilateral constrained adaptive neural controller, BC-ANC)来解决上述问题。

大腿假肢应用场景
本文主要工作
在双侧约束自适应神经网络控制方案(图1)中,我们考虑随机步态协同目标,提出了具有耦合时变非对称约束的大腿假肢-人随机非线性模型,设计了一种新的自适应神经网络反步控制方案。研究的主要贡献如下:

图1 双侧约束自适应神经控制方案
1.提出了基于一类机器人-环境交互模型扩展随机模型的新框架。不同于确定性假肢-人非线性系统,基于环境随机扰动的测量实验(图2a)和统计分析(图2b),我们使用数据驱动稀疏方法,辨识了随机不平坦地形的接触力模型(图2c)并严格推导得到了大腿假肢-人随机非线性动力学系统。该框架在理论上更适用于处理机器人与环境相互作用导致的随机干扰,例如地面刚度不均匀或高度变化等。在此基础上,大腿假肢的控制可以转化为多输入多输出(MIMO)随机非线性系统的轨迹跟踪问题。
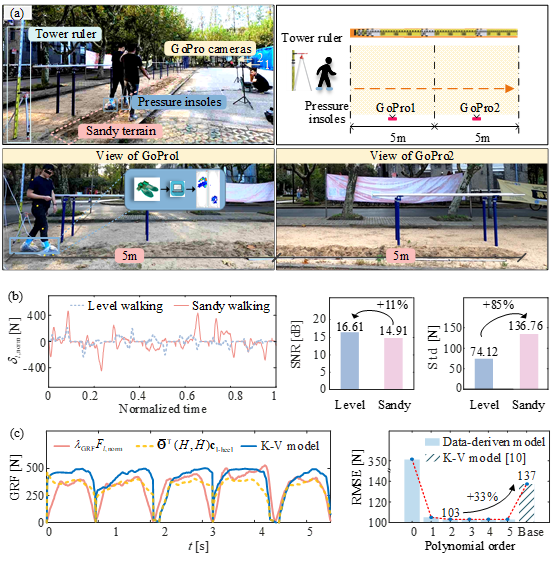
图2 沙地环境和平坦地形下的地面接触力实验和数据驱动辨识
2.解决了大腿假肢-人随机非线性系统的步态规划问题。这是本工作针对受到随机干扰的人机交互系统轨迹规划问题的一个突破。由于现有研究中确定性期望轨迹存在的限制,本研究通过学习健肢腿的在线运动,继承其理想轨迹,从而实现环境适应性和双侧肢体的协同性。更为重要地,本文对大腿假肢的运动约束进行了建模(如图3),为大腿假肢自适应约束控制提供了理论依据和生物力学基础。

图3 大腿假肢的约束建模
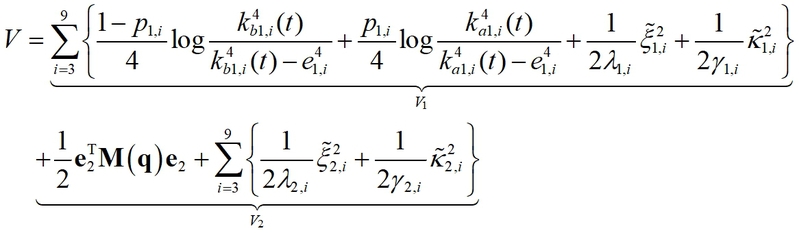
3.首次解决了具有耦合约束的大腿假肢-人随机系统的控制问题。我们引入了全新的非对称型时变障碍李亚普诺夫函数(Barrier Lyapunov function, BLF)(1)来处理耦合的生物约束。本文提出的BLF是非对称时变的,更重要的是,将所构造的BLF与自适应神经网络相结合,提出了基于反步技术的自适应神经网络控制算法。通过Lyapunov稳定性理论证明,我们提出的控制方案打破了传统方法中状态约束的保守性,同时提高了人-机非线性系统的协同性。
研究结果验证了我们提出的ANC控制方案对大腿假肢-人随机系统的有效性。图4(a-d)展示了受ANC控制的系统可以准确跟踪大腿假肢的期望轨迹,并且不违反耦合的时变非对称约束。此外,从图4(e-l)中误差信号的相图可以看出,ANC的控制误差保持在零附近的微小区域内。图5还表明,尽管大腿假肢-人随机非线性系统存在全状态约束和随机扰动,但所提出的控制方案仍然驱控了大腿假肢在随机地形上的稳定运动。总之,大腿假肢-人随机非线性系统的控制结果表明,该ANC控制方案在随机干扰下具有良好的跟踪性能和稳定性。
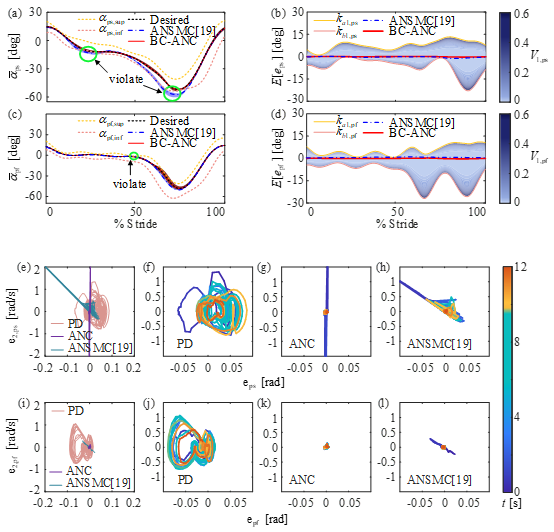
图4 大腿假肢的控制误差相图(ANC为本文结果,PD和ANSMC为对比方案)

图5 大腿假肢随机地形上的运动行为
结论
针对随机不确定性和约束问题(主要考虑不平坦地形(沙地)足底接触力和步态约束的特殊性),本文首次基于假肢-人随机动力学模型,研究了随机不确定情形的受约束协同控制和稳定性分析方法,提出了随机框架下依概率协同和受约束的步态规划策略,实现随机地形下假肢-健肢协同驱控。
原文链接:https://doi.org/10.1016/j.ijmecsci.2022.107896
相关系列研究:https://doi.org/10.1016/j.ijmecsci.2021.106942
延伸阅读:
仿生结构与机器人实验室(BSRL)隶属于复旦大学工程与应用技术研究院智能机器人研究院,由徐鉴教授和方虹斌青年研究员领导,主要研究方向为:
*具有超常规静力学、运动学和动力学性能的仿生结构和仿生机器人开发。
*基于可变结构和多驱动器的仿生多模态、模块化机器人的协同驱控。
*仿生移动机器人对可变工作环境的自适应与共融动力学。
*基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制。
*基于可变拓扑结构的仿生机械超材料力-光-电-声多场耦合动力学。
实验室围绕“仿生结构与机器人”这一主题开展了交叉创新研究,相关学术成果发表在Advanced Materials、IEEE Transactions、Journal of Sound and Vibration、《力学学报》等国内外顶级期刊与国际学术会议。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码