新闻动态



近日,工研院青年研究员张壮与西湖大学讲席教授姜汉卿团队以及上海交通大学陈根良教授、王皓教授团队分别共同报道了一种“可持续性双闭环机器人系统”与一种“基于刚弹软耦合的高频气动振荡器”。相关研究工作以“Biodegradable Origami Enables Closed-Loop Sustainable Robotic Systems” 以及“A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion”为题于2025年2月7日分别发表于《科学进展(Science Advances)》与《自然通讯(Nature Communications)》杂志。张壮青年研究员分别担任两篇文章的共同第一作者与共同通讯作者。

原文链接:https://www.science.org/doi/10.1126/sciadv.ads0217
原文链接:https://doi.org/10.1038/s41467-025-56704-1
一、可持续性双闭环机器人系统
近年来,软体机器人由于其高度柔性和顺应性的特点,可以高度适配用户友好的人机交互界面,因此获得蓬勃发展。目前,基于化学合成的橡胶态软材料由于其较好的成型性、弹性、稳定性以及多功能性,成为软体机器人构筑用材料的主要选择。然而,这些橡胶态软材料的制备过程通常涉及对环境有害的有机溶剂或者产生无法降解的产物,对于机器人领域的可持续发展产生严重的负面影响。为了解决机器人制备过程中对于环境的负面影响,研究者们开始开发可回收或可降解凝胶用于构筑软体机器人,但是所构筑的软体机器人通常只具有单一的驱动或传感功能,并且由于凝胶材料力学性能的限制,所构筑的机器人的性能通常较差。因此亟需开发一种基于力学稳定可持续性材料的新型机器人结构,实现具有全机器人功能的可靠、可持续以及可降解的软体机器人系统。
为了解决上述难题,研究团队将可生物降解纤维素薄膜与可变形折纸技术结合,辅以同样可生物降解的明胶离子凝胶,提出了一种构筑可持续和可生物降解的模块化自感知折纸机器人的新方法。这种方法可以为高塑性材料和软体机器人应用场景之间架起一座桥梁,有望进一步推动高强度塑性材料在软体机器人领域的应用。可持续折纸机器人模块由甘油增塑的纤维素薄膜、3D打印固定板以及明胶基离子凝胶传感器组成。纤维素折纸与明胶基凝胶分别利用水系溶剂体系进行制备,两者的合成过程均不使用任何环境不友好的有机溶剂,构筑机器人系统过程的可持续性显著提升。利用该方法构筑的可持续性软体机器人系统同时实现了生态循环(生长-加工-降解)和机器人功能(驱动-传感-交互)的双闭环系统。
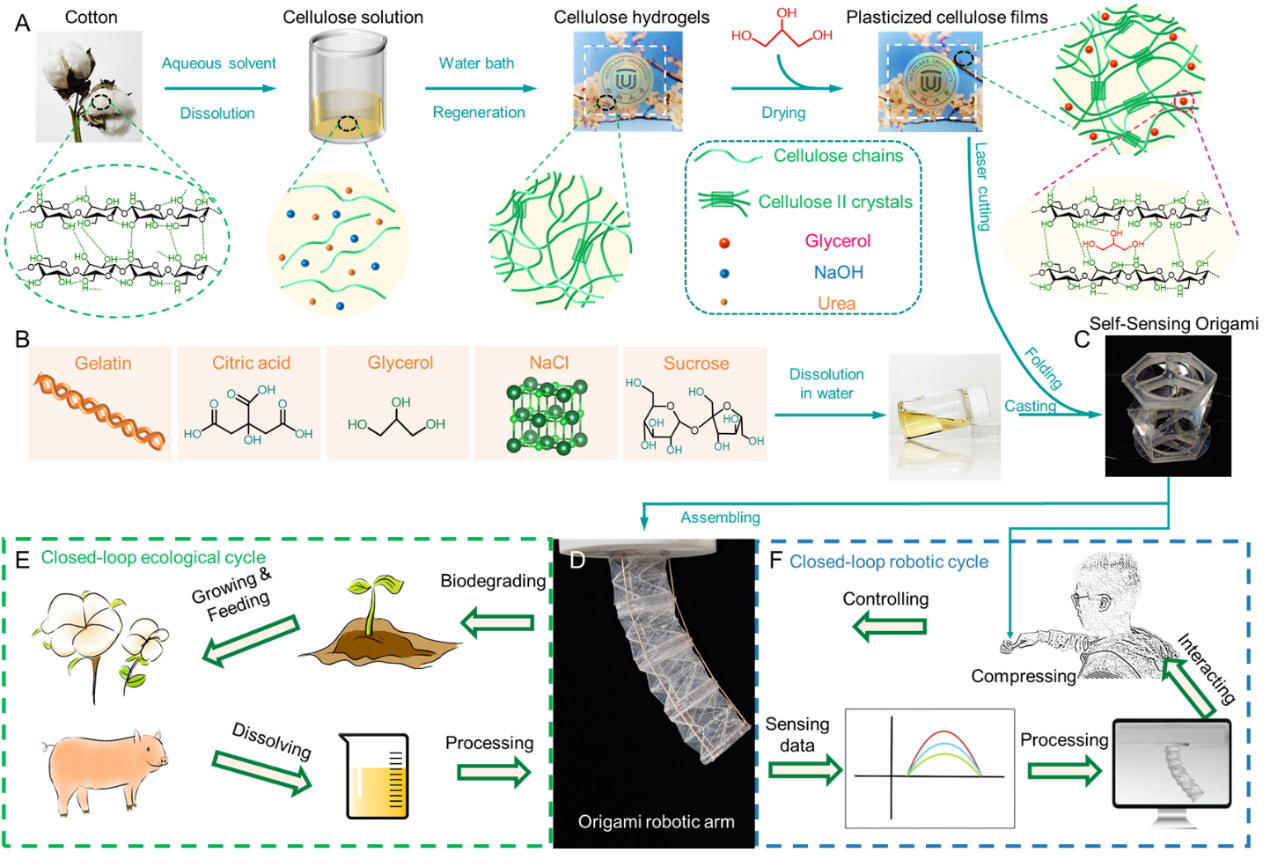
图1-1. 可持续性折纸机器人系统的构筑方法
纤维素膜的土壤降解实验显示其在8周内可以降解超过98%的重量,显示出其卓越的生物降解性,作为对比,常见的折纸构筑材料-PET在土壤中相同时间下完全不能降解。该研究对纤维素折纸的制备过程进行了详细的生命周期评价,分析结果显示纤维素折纸在具有优异的生物降解性和生物相容性的同时,制备工艺的可持续性保持在较低水平,进一步通过在合成过程中引入可再生能源并开发规模化生产工艺有望显著降低其环境影响。
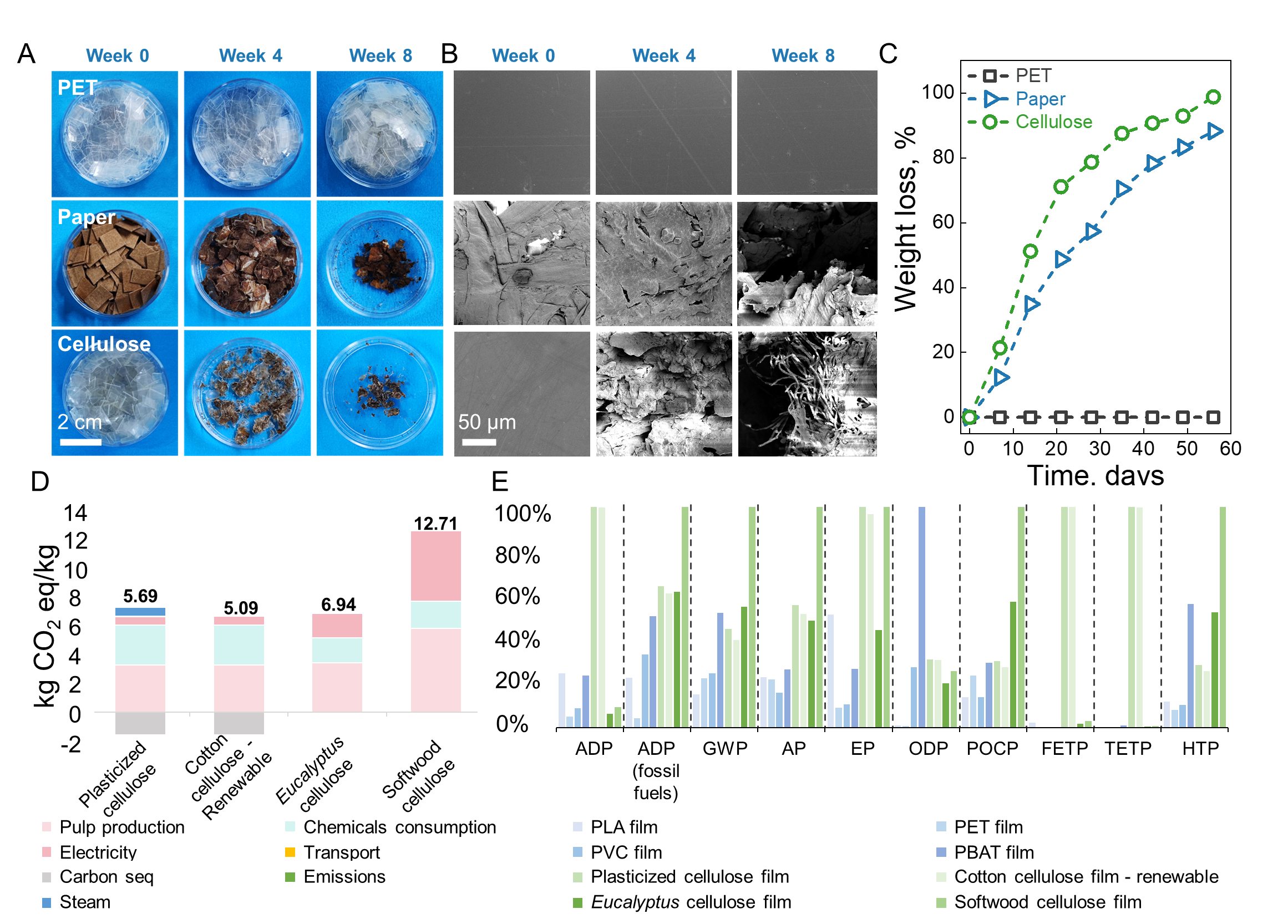
图1-2.生物降解性与可持续性评估
研究团队将增塑后的可降解纤维素薄膜基于Kresling折纸构筑了具有优异三维可逆变形能力的折纸模块,在压缩模式下循环加载/卸载一百次能够保持初始形状,并且力学响应保持稳定,证明其作为驱动器的应用潜力。而折纸模块充足的内部空间使得传感器的进一步集成成为可能。因此该研究进一步将三组明胶离子凝胶传感器嵌入折纸模块内部,离子凝胶传感器随着折纸模块的单轴压缩而产生弯曲,导致电阻发生变化,通过标定电阻变化和折纸位移变化的对应关系,实现了自传感折纸机器人模块的构筑。
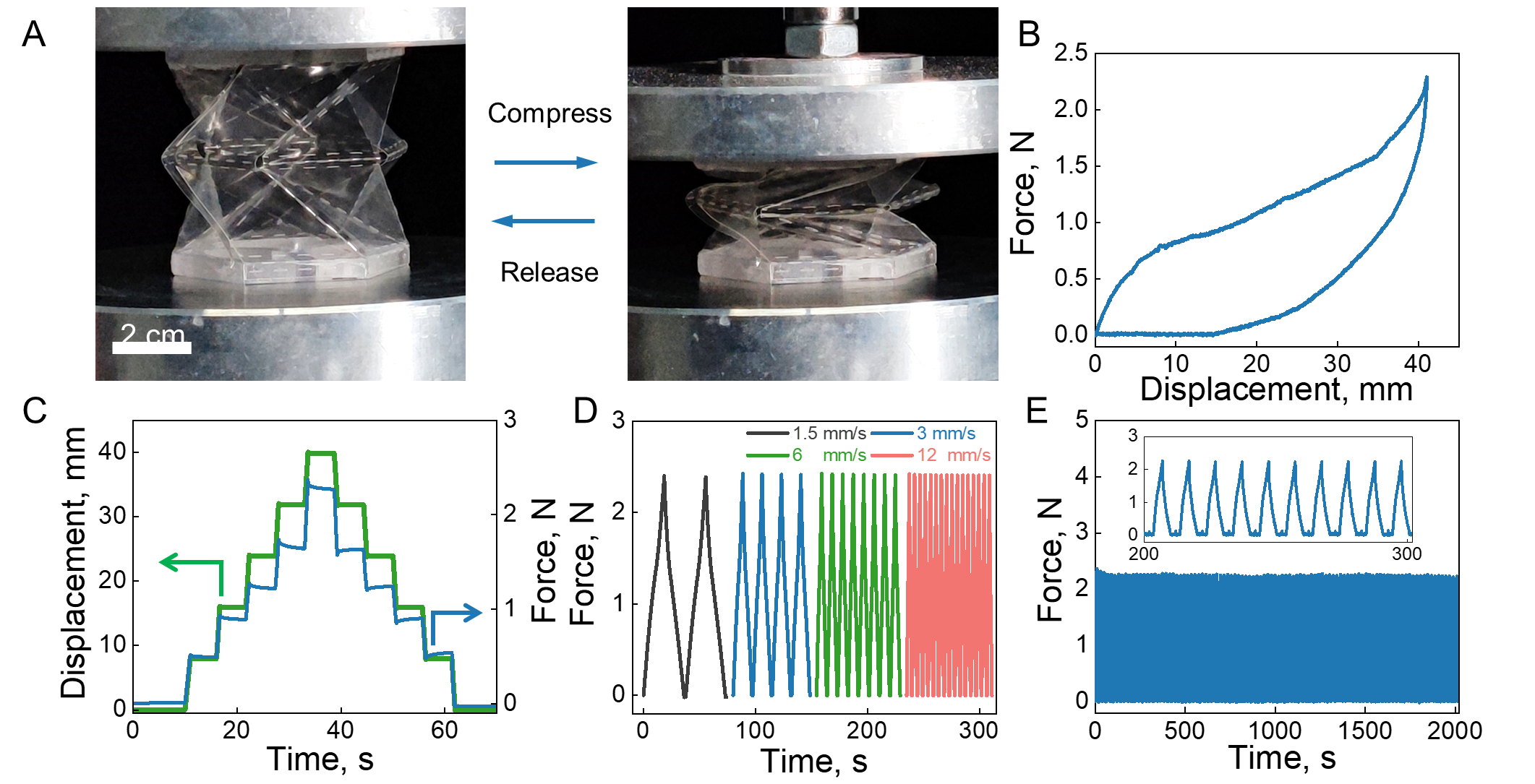
图1-3.纤维素折纸单元的力学性能
由于折纸单元的模块化特性,进一步将多个折纸模块串联,构筑的绳驱动折纸机械臂,具有伸缩和万向弯曲能力。而本研究构建的自传感折纸单元,通过对于不同位置的局部按压,会使得内部三组传感器产生不同的电阻变化,因此可以作为控制器控制电机带动机械臂的运动。同时自传感折纸模块串联后的机械臂同样具有自传感能力,通过将4节折纸模块内部各三组传感器数据进行分析,可以获得机械臂的运动情况,从而利用相同的单元,同时实现机器人控制人机交互界面以及机械臂本体的构筑,并实现机器人系统闭环控制。
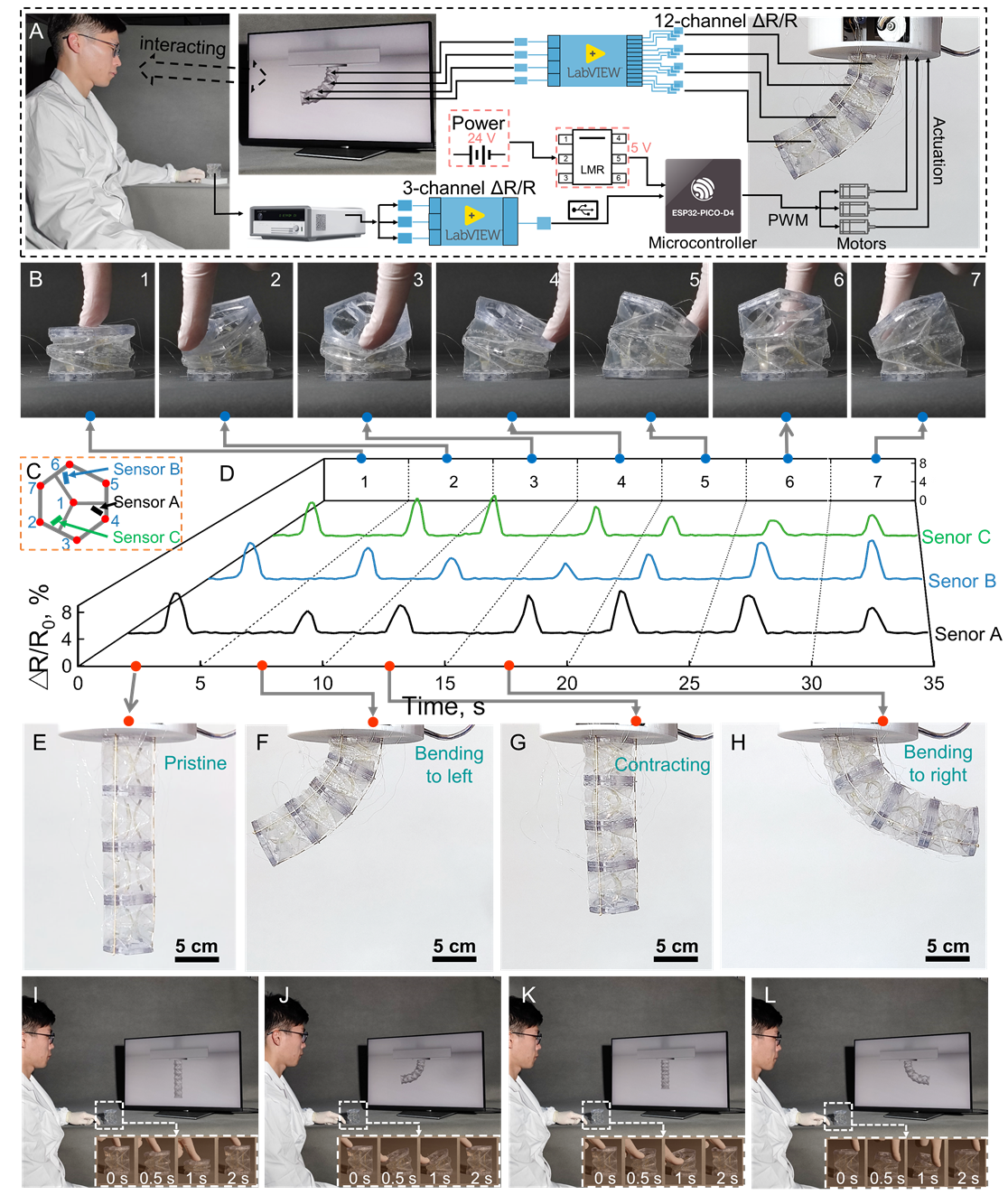
图1-4.驱动-传感-交互闭环控制机器人系统构建
二、基于刚弹软耦合的高频气动振荡器
气动柔性机器人因其卓越的人机交互性,近年来获得了国际机器人领域的广泛关注。然而,传统的设计方法大多依赖电子电路和刚性阀门,这不仅增加了控制成本,还限制了系统在极端环境中的应用。因此,如何在不依赖电子电路和刚性阀门的情况下,实现气动机器人自主驱控能力和高响应性能,成为当前气动柔性机器人驱动控制研究中的一大难题。
为了解决这一难题,研究团队提出了“面向机器人多模式驱动的无电子化高频气动振荡驱动器”,并提供了一种全新的气动机器人驱动方式。该设计通过利用铰接双稳态梁的屈曲失稳现象,结合织物基折展驱动腔和柔性阀门,构建了流体反馈回路。该创新突破了现有无电子化驱动器在功能和驱动频率方面的限制,具备了高频工作、驱动功能多样、相位可调等显著优点,能够应用于多种机器人驱动场景。
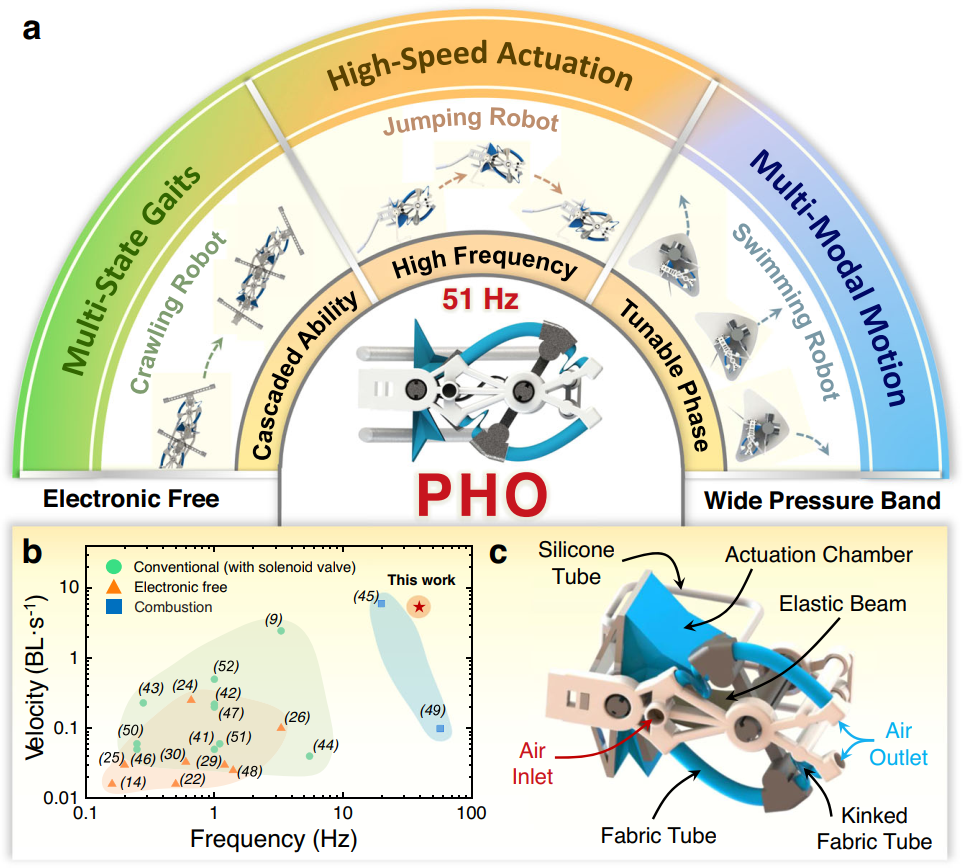
图2-1. 面向机器人多模式驱动的无电子化高频气动振荡驱动器
现有的气动振荡驱动器通常通过弹性结构的机械不稳定性,将恒定供应压力转化为周期性输出,以驱动机器人执行特定任务。然而,现有设计大多依赖环路振荡结构,这使得振荡频率较低且模式单一,限制了这类元器件的应用。为了解决这一问题,本研究引入了刚弹软耦合的设计理念,将折展驱动腔、屈曲双稳态梁和柔性换向阀结合,通过特殊流道设计构建反馈回路,从而实现单驱动器独立振荡,无需下拉电阻。该设计通过铰接双稳态梁在失稳跳变过程中主被动轴的相位差,构建了流道切换窗口,大幅提升了频响带宽,成功实现了高达51Hz的振荡频率。这一性能大幅超越了现有无电子化气动振荡驱动器,同时在性能上也明显优于基于传统电磁阀的气动驱动器。
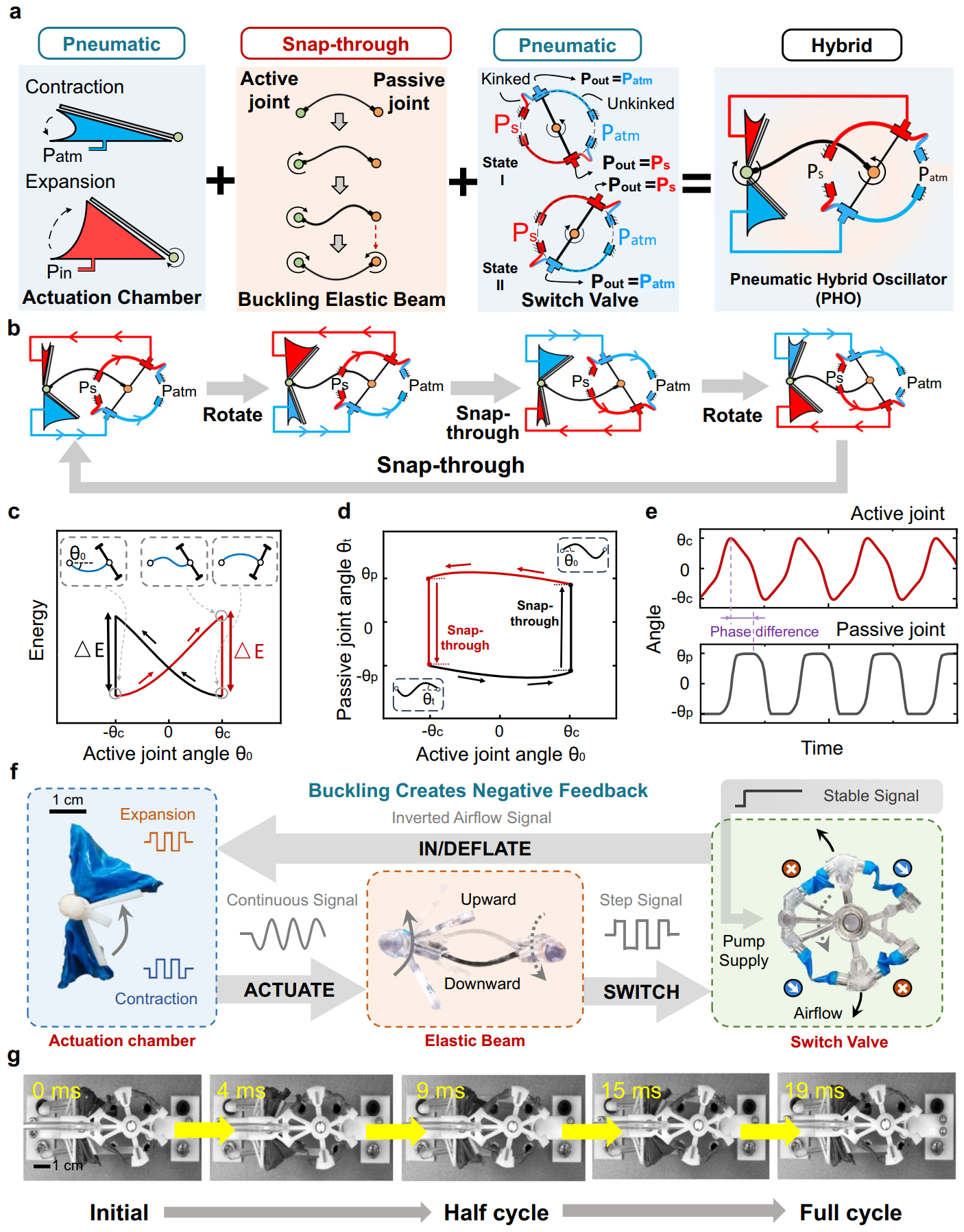
图2-2. 振荡器设计与驱动原理
基于提出的高频振荡驱动器,研究团队开发了一款模仿袋鼠运动的双足跳跃机器人。该机器人包括一对双足和一根柔性尾部,利用摩擦力的各向异性实现持续的前向运动。研究发现,机器人的运动性能与驱动频率、起跳角度、跳跃步长和滞空时长占比密切相关。通过优化机器人的双腿安装角度和驱动频率,最终实现了最高5.1倍体长每秒的运动速度。这一速度不仅大幅超过了现有无电子化气动机器人,还领先于使用电磁阀门的气动机器人。实验结果表明,所提出的轻量化振荡驱动单元具有突出的输出性能。
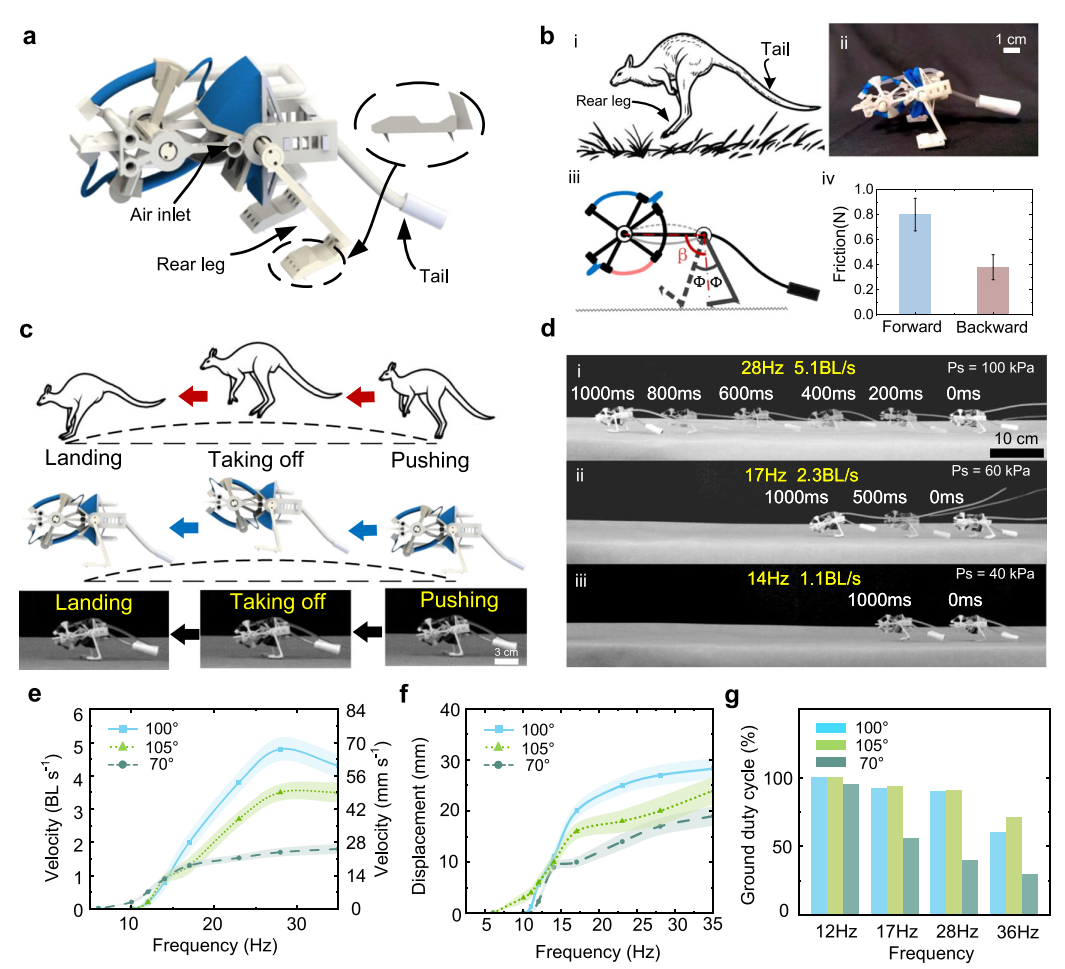
图2-3. 双足高频自振荡气动跳跃机器人
针对常规振荡器依赖环路振荡的设计局限,本研究提出的振荡单元能够任意级联多个驱动单元。通过将多个振荡器的流道进行组合编辑,可以实现丰富的级联响应模式,适用于具有多个逻辑驱动单元的机器人系统。基于此设计,本研究提出了一种多足爬行机器人,该机器人由两个级联振荡器构成。在恒定气源输入下,两个驱动单元交替响应,实现稳定且快速的前向爬行运动。
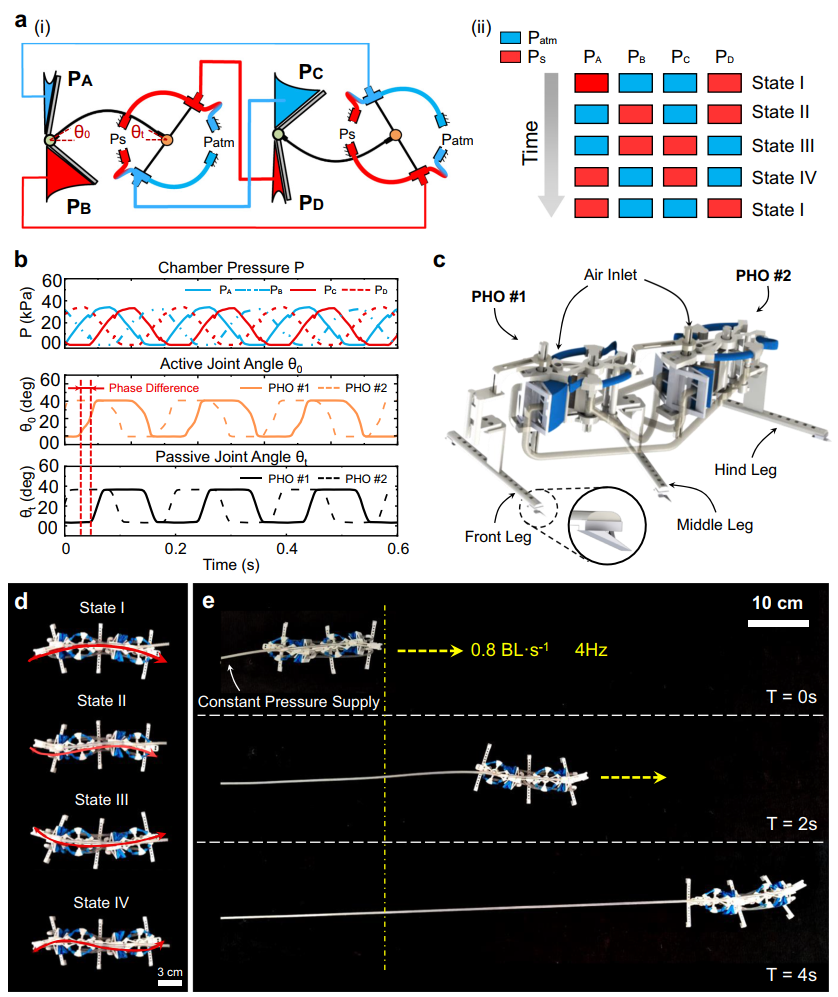
图2-4. 基于多振荡器级联级的爬行机器人
为实现振荡器频率设计后的输出可调,本研究在主弹性板基础上引入了辅助弹性板。通过将辅助弹性板并联到主弹性板上,利用辅助弹性板的变形调节主弹性板的屈曲过程,从而实现振荡相位的精确调整。基于这一原理,研究团队设计了一款无缆机器鱼,并使用二氧化碳气瓶作为气源。在相同气源条件下,通过调整辅助梁的配置,可以实现丰富的航迹选择,极大拓宽了振荡驱动器的应用场景。
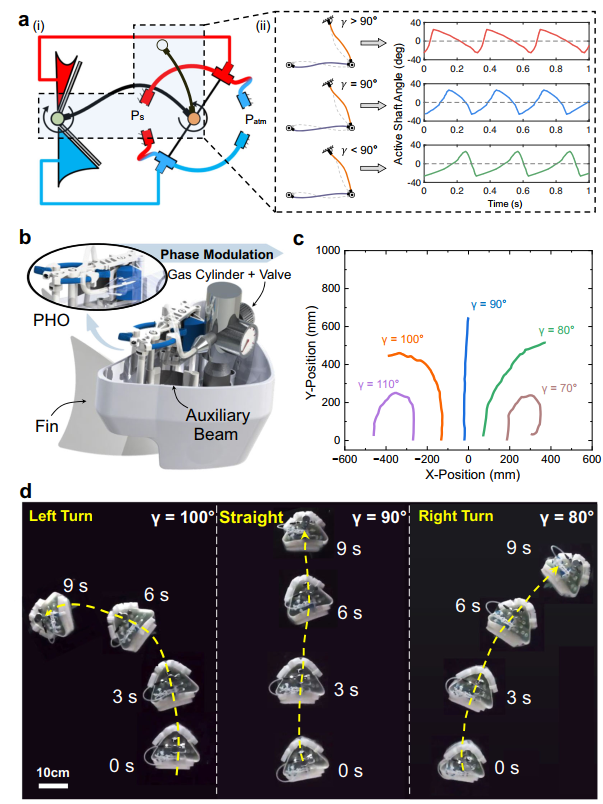
图2-5. 可调振荡相位的无缆化机器鱼
作者简介与招聘信息
作者简介:张壮,复旦大学工程与应用技术研究院青年研究员、博士生导师。2021年于上海交通大学获得博士学位,随后于西湖大学开展博士后研究,并于新加坡国立大学等海外高校开展访问研究,与斯坦福大学、西北大学、牛津大学、EPFL等海外知名高校团队以及西湖大学、上海交通大学等国内知名高校团队保持良好关系与密切合作。研究方向包括但不限于多模态触觉传感与反馈交互、折纸/剪纸机器人与超材料、柔性与刚柔耦合驱动器、传感器及机器人系统等。近三年以第一/通讯作者于Nature Machine Intelligence, Nature Communications, Science Advances, IEEE Transactions on Robotics等国际权威期刊发表论文十余篇,担任ICRA, Cyborg and Bionic Systems, Soft Science等期刊与顶会的副编及青年编委。曾获中国十大新锐科技人物创新贡献奖、IROS New Generation Star等荣誉奖项。
博士后招聘:提供具有竞争力的薪资待遇与科研支持、灵活的研究课题与海外交流机会。申请者需取得或即将取得机械、电子、材料、自动化、计算机、生物医学工程等相关专业领域的博士学位。有意者请将将个人简历(包括教育和工作经历、主要科研内容、发表论文)以“博士后应聘+本人姓名”为主题发送至flexrob@fudan.edu.cn邮箱。
预期研究方向:多模态触觉感知与反馈;软体与连续体机器人;折纸/剪纸机器人;力学超材料与响应性功能材料;柔性可穿戴器件与外肢体机器人;基于可降解材料的环境友好型机器人系统;其他申请人所擅长的机器人、柔性电子、智能材料等相关课题。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码