新闻动态



近日,复旦大学工程与应用技术研究院(以下简称“工研院”)、智能机器人研究院仿生结构与机器人实验室(BSRL)在仿蚯蚓移动机器人领域的最新研究成果——题为《Continuum modeling and dynamics of earthworm-like peristaltic locomotion》(仿蚯蚓蠕动运动的连续体模型及其动力学)的学术论文在力学旗舰期刊《Journal of the Mechanics and Physics of Solids》上发表。
原文链接:https://doi.org/10.1016/j.jmps.2025.106034
研究背景
蚯蚓的蠕动运动是一种在狭窄受限空间中高效移动的机制,其通过环向和纵向肌肉的拮抗收缩和伸长产生后退蠕动波,从而实现前进。这种运动机制在仿生机器人领域具有广泛的应用前景,尤其是在管道检测、医疗内窥镜等领域。然而,现有的蠕动运动的连续体模型大多忽略了惯性、摩擦力和非线性本构的影响,导致模型无法准确描述实际运动中的复杂动力学行为。本文提出了一种新的连续动力学模型,首次将惯性、非线性本构、摩擦力和应变波纳入考虑,为蚯蚓及仿蚯蚓机器人的运动分析提供了更全面的理论框架。
研究进展
本研究通过实验测量蚯蚓的拉伸特性(图1)和地面反作用力(图2),精确表征了蚯蚓的非线性本构模型和各向异性库仑干摩擦模型,并基于此构造了包含非线性本构、惯性效应、摩擦力和应变波的仿蚯蚓蠕动运动连续体动力学模型(图3)。
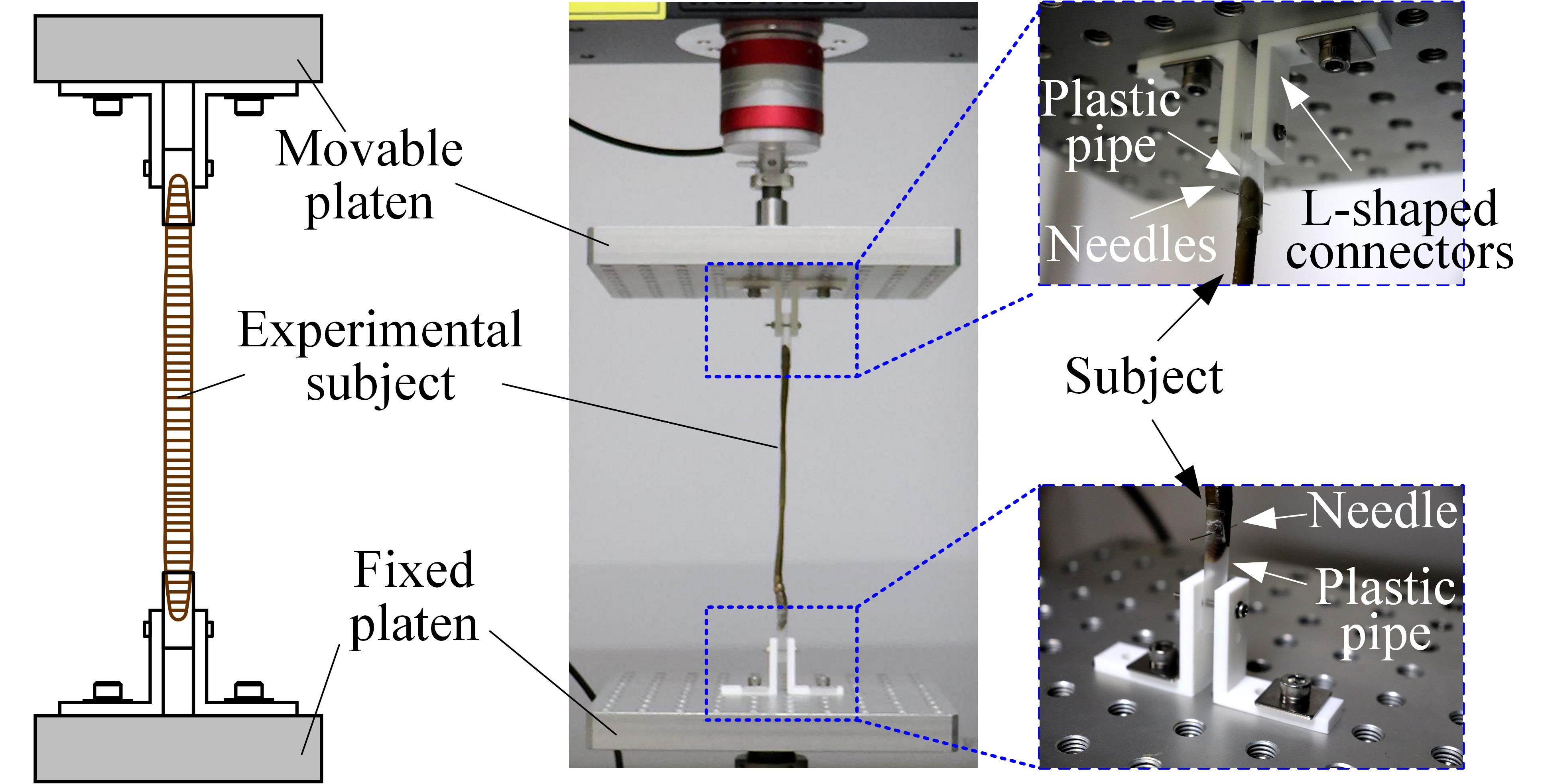
图1 蚯蚓轴向拉伸测试
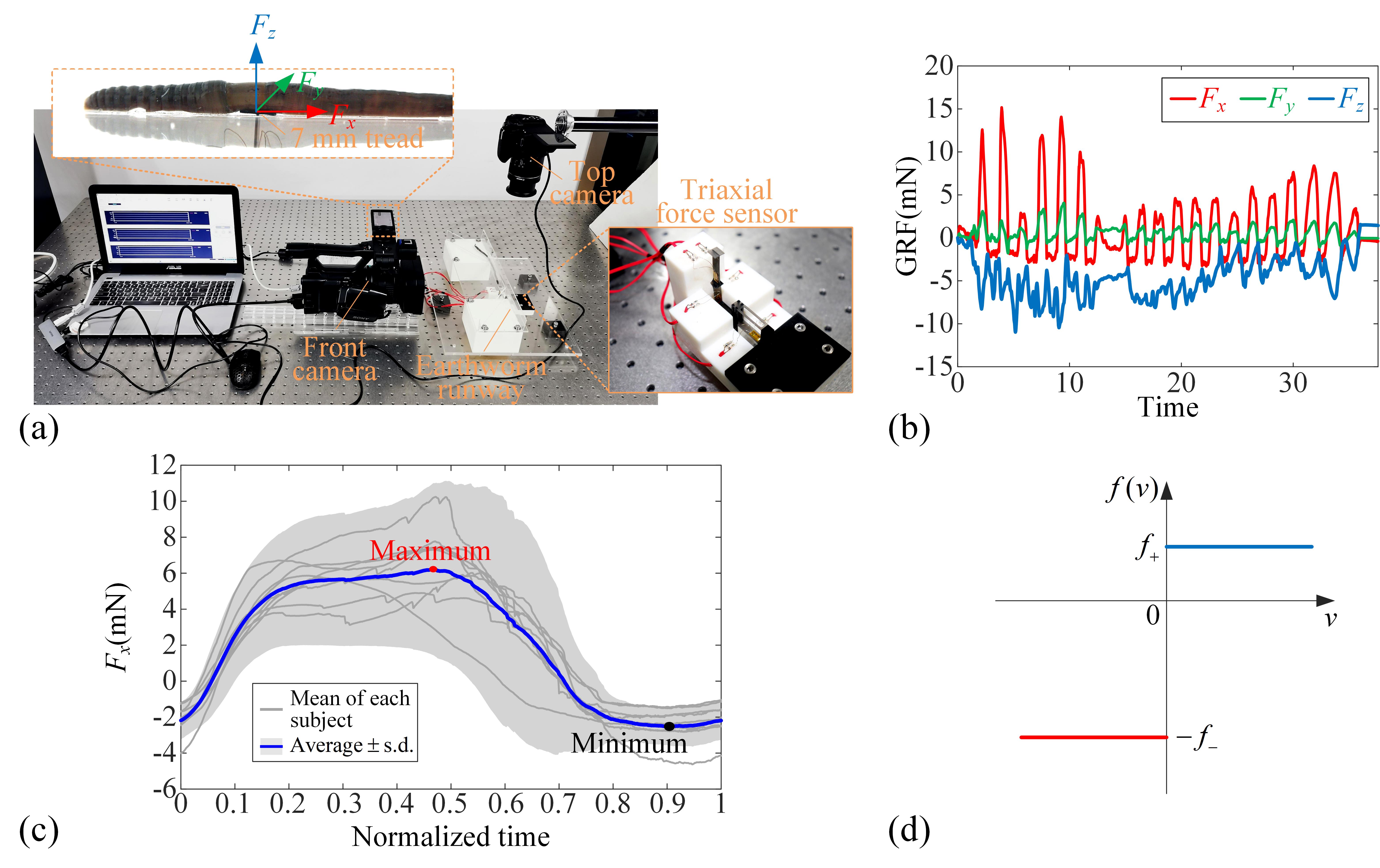
图2 蚯蚓与地面接触力测量实验
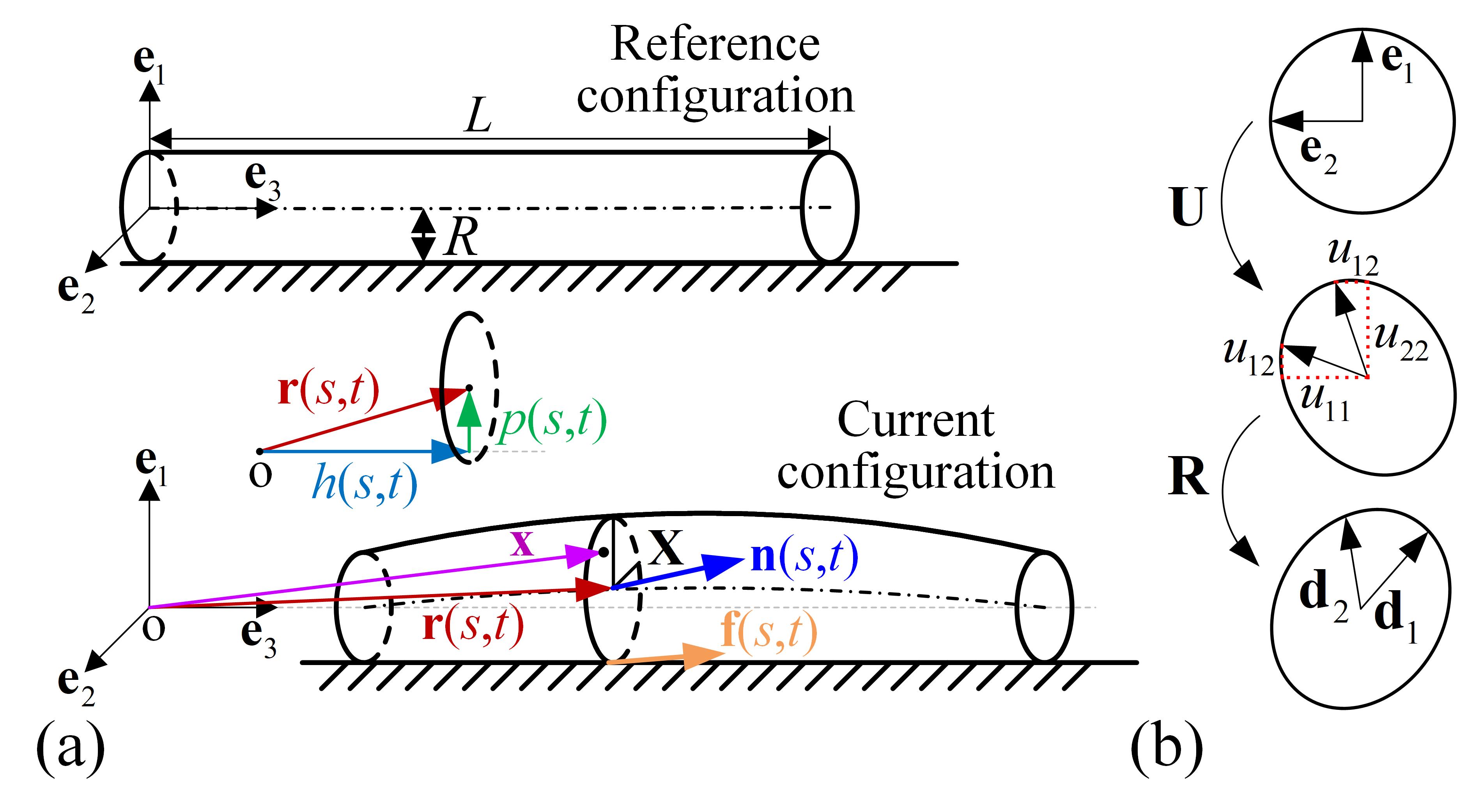
图3 包含非线性本构、惯性效应、摩擦力和应变波的仿蚯蚓蠕动运动连续体动力学模型
我们研究了两种场景下蠕动运动的动力学行为:一种是在力场作用下的运动,另一种是在应变场作用下的运动。结果表明,两种场景下的蠕动运动具有相似的运动机制,但由于向后滑动的差异,平均速度有所不同(如图4所示)。
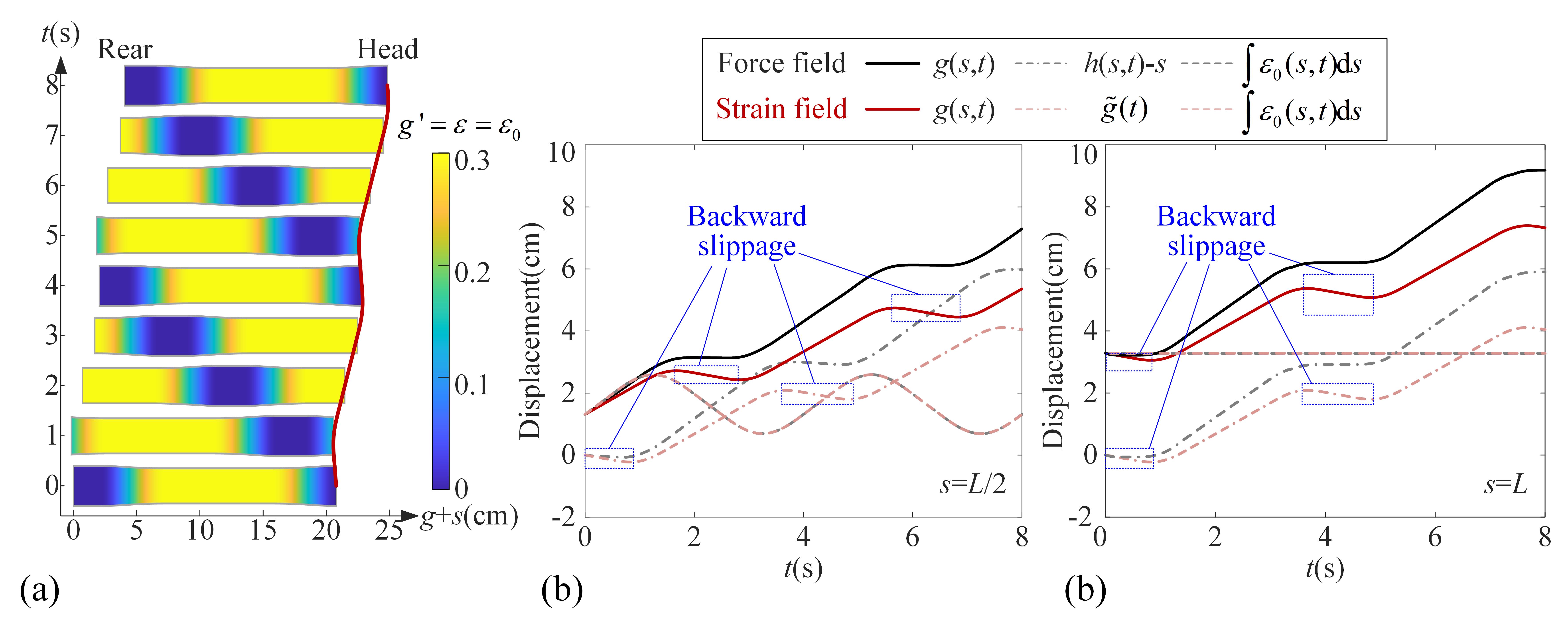
图4应变场作用下的仿蚯蚓蠕动。(a) 身体中应变的演化;(b)和(c)分别展示了中间点和头部在力场和应变场作用下的位移-时间历程
我们进一步研究了惯性和应变波参数对蠕动动力学的影响。在力场作用下,较大的惯性会增加向后滑动,降低平均速度;而在应变场作用下,较高的应变波幅值会提高速度,但也会增加向后滑动。此外,应变波中的锚定和伸展/收缩间隔对非光滑的粘滑动力学和平均速度有显著影响(图5),这与之前仿蚯蚓机器人步态研究结果一致。该研究凸显了连续介质动力学模型在分析活体蚯蚓蠕动运动中的重要性,也为仿蚯蚓机器人的控制和性能优化提供了新思路。
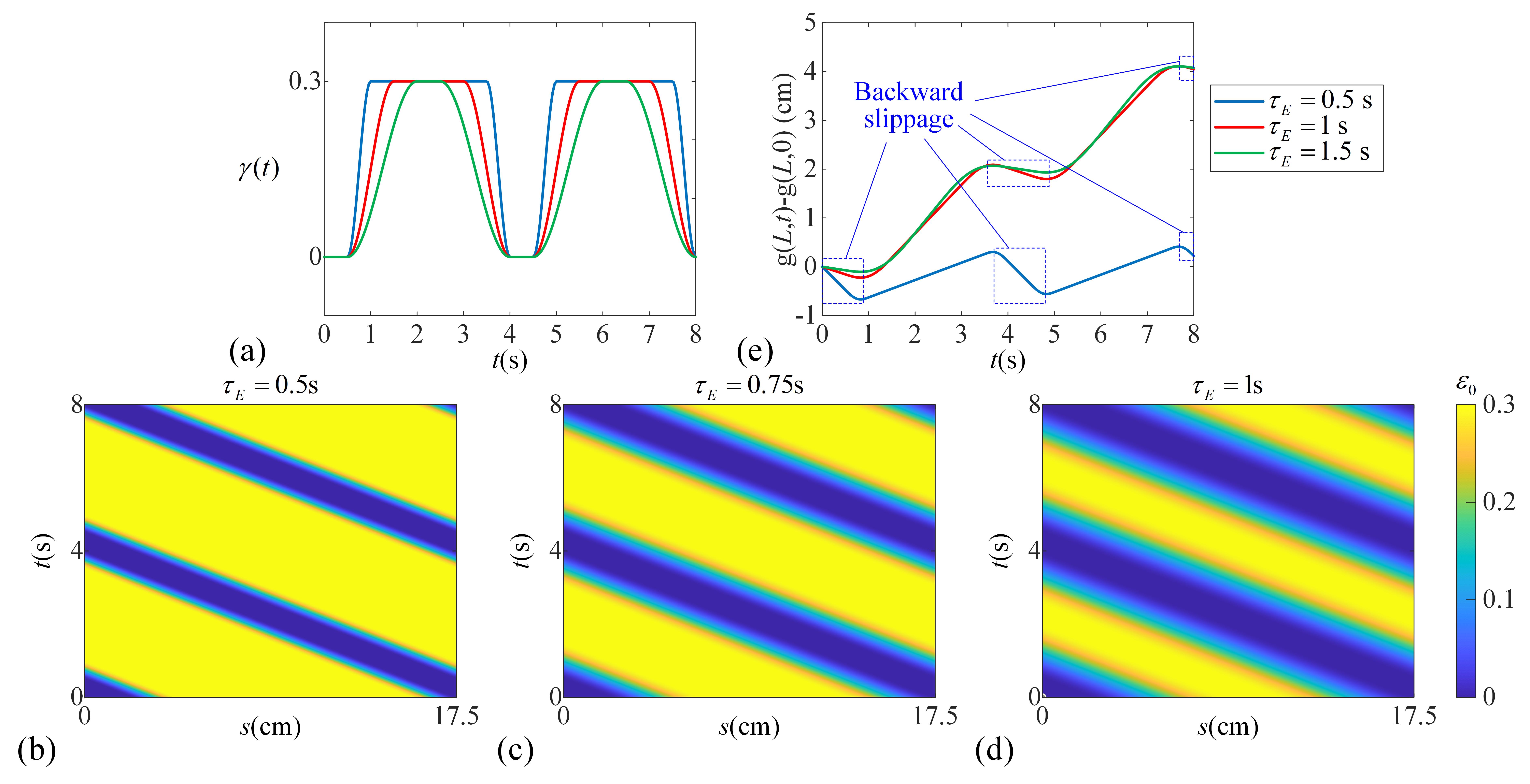
图5 应变波中的锚定和伸展/收缩间隔对非光滑的粘滑动力学和平均速度的影响
未来展望
本研究提出的连续动力学模型为蚯蚓及仿蚯蚓机器人的运动分析提供了新的理论工具,能够更准确地描述实际运动中的复杂动力学行为。未来研究可以进一步结合蚯蚓或仿生机器人的变形与地面反作用力的同步测量,探索切向和法向相互作用力耦合的复杂系统。该模型在仿生机器人设计、控制和性能优化方面具有广泛的应用前景,尤其是在狭窄空间中的移动机器人领域。
研究的项目基金资助信息
本研究获得了国家自然科学基金(11932015,12272096)、上海市基础研究特区(复旦大学 21TQ1400100-22TQ009)的资助。
仿生结构与机器人实验室介绍
仿生结构与机器人实验室(BSRL)隶属于复旦大学工程与应用技术研究院智能机器人研究院,由徐鉴教授和方虹斌教授领导,主要研究方向为:
具有超常规静力学、运动学和动力学性能的仿生结构和仿生机器人开发
基于可变结构和多驱动器的仿生多模态、模块化机器人的协同驱控
智能假肢、外骨骼和人形机器人人机协同动力学与控制
仿生移动机器人对可变工作环境的自适应与共融动力学
基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制
基于可变拓扑结构的仿生机械超材料力-光-电-声多场耦合动力学
实验室围绕“仿生结构与机器人”这一主题开展了交叉创新研究,相关学术成果发表在Advanced Materials、Advanced Science, IEEE Transactions、International Journal of Robotics Research, Journal of the Mechanics and Physics of Solids、Mechanical Systems and Signal Processing、《力学学报》等国内外顶级期刊与国际学术会议。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码