新闻动态



2025年1月,复旦大学工研院智能机器人研究院智能工艺机器人及装备实验室的两项最新学术成果被2025 IEEE International Conference on Robotics & Automation (ICRA 2025) 录用。
论文简介
(1) A Novel Tendon-Driven Articulated Continuum Robot with Stabilized Self-Locking Joints
第一作者:21级博士生任建坤;通讯作者:齐立哲研究员
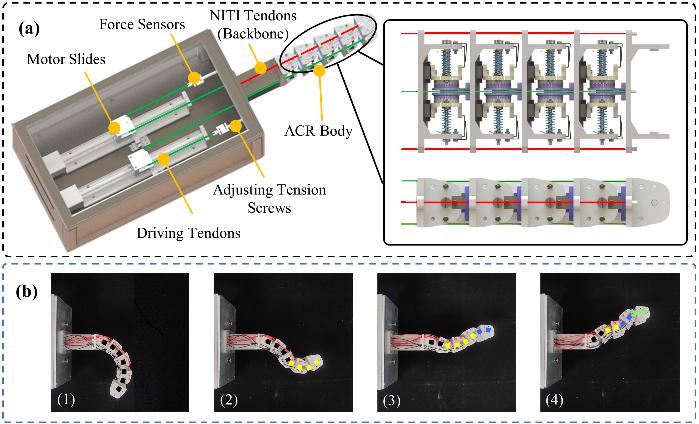
图1关节式连续体机器人概念视图
在工业领域,传统机器人难以满足多种非结构化场景的任务要求。由于连续体机器人具有灵活性、柔顺性及适应性强等特点,作为连续体机器人的一种,由刚性关节串联组成的关节式连续体机器人,如脊椎型动物的肌肉骨骼组织一样,兼具刚性和柔顺性,成为研究热点之一。一类使用大量的刚性铰链作为连接关节的肌腱驱动的关节式连续体机器人被提出,但需要大量的致动器和驱动绳索分布去完成每个关节的独立控制,使得控制系统十分复杂。针对这一问题,多关节段式连续体机器人方法被提出,即由几个关节组成的关节段共同使用一组致动器单元,以减少整体致动器的数量。这虽然降低了控制系统的复杂性,但仍需多组驱动单元,同时限制了机器人的灵活性。因此亟需开发一种新型的连续体机器人结构,实现在少驱动的同时仍保持机器人原有的灵活性。为了解决上述难题,研究团队提出一种新的设计思路:在每个旋转关节集成形状结构锁定约束功能。这意味着只有在释放锁定约束时,相应的关节才能旋转。不仅能减少驱动系统的复杂度,同时还可以保证机器人的灵活性和柔顺性。
基于这种思路,研究团队提出了一种具有稳定自锁关节的新型肌腱驱动关节式连续体机器人,其概念视图如图1所示。如图1(a)所示,该机器人包括连续体身体、电机滑台、弹性骨架、驱动间、力传感器等组成。ACR body由稳定自锁关节以旋转轴平行的方式串联构成。在驱动装置中,设置了两个电机滑台分别拉动两侧肌腱,通过动滑轮使得电机滑台的位移得到双倍利用,可有效地减小驱动箱的尺寸。在驱动肌腱的固定端设置张力调节螺钉与力传感器,实现对它的运动前的张力调整和运动过程中的张力监测。
研究团队提出的具有稳定自锁关节的新型肌腱驱动关节式连续体机器人优势可总结为:
1.稳定自锁关节在通过SMAs和弹簧触发机械约束后,可以零功耗地保持锁定或释放状态;
2.该机器人在仅设置一组驱动单元的情况下仍拥有多种运行模式,具备可变的运动表现和多样的工作空间,兼具灵活性与柔顺性;
3.机器人的刚度也随着关节锁定状态而发生改变。当所有关节都自锁时,机器人可以不需要电机驱动来维持形状。
如图2所示,研究团队受棘轮机构的启发,基于端面棘轮机构原理提出的稳定自锁关节的设计方案,在关节自锁时端面棘齿全部啮合,锁定力均布在每个齿上,比单齿锁定更可靠。根据提出的稳定自锁关节特点,将其分为棘齿锁定单元和稳定执行单元两部分描述:
(a) 棘齿锁定单元
该单元包括外壳、导轨、滑块、正向和负向端面棘轮滑块、轴承。直线导轨固定安装在外壳上,与阶梯轴的方向平行。当正向或负向端面棘轮滑块与对应的旋转连接件棘齿进行啮合,关节的对应旋转方向被锁定,反之释放。
(b) 稳定执行单元
该单元包括形状记忆合金弹簧、弹簧、铜片、导向槽、拉钩、弹性压板等。导向槽加工在端面棘轮滑块的侧面,内部呈阶梯状,每个阶梯高度为0.5mm。弹性压板对拉钩的末端保持按压,使其与导向槽底部稳定接触。因此,当端面棘轮滑块往复移动时,拉钩末端只能在导向槽内单向移动。在执行单元与棘轮锁定单元的配合下,可零功耗地保持停留在导向槽的位置a和c,从而改变棘轮的啮合状态。因此,关节拥有四个稳定工作状态:正向旋转、负向旋转、双向旋转和自锁。
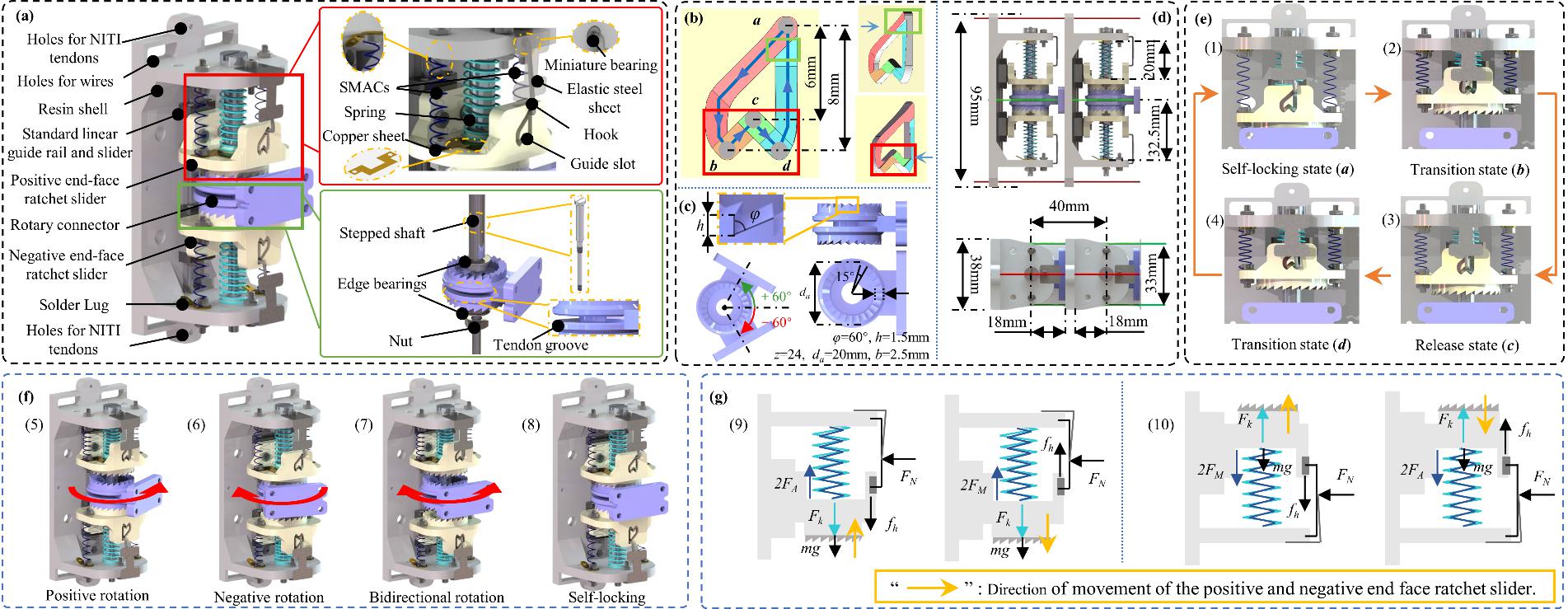
图2 稳定自锁关节的设计细节
如图3所示,研究团队完成选型并制作了稳定自锁关节样机,并对正向和负向端面棘轮滑块分别进行了300次重复性实验,在实验过程中未出现故障。证明了稳定自锁关节的可靠性。
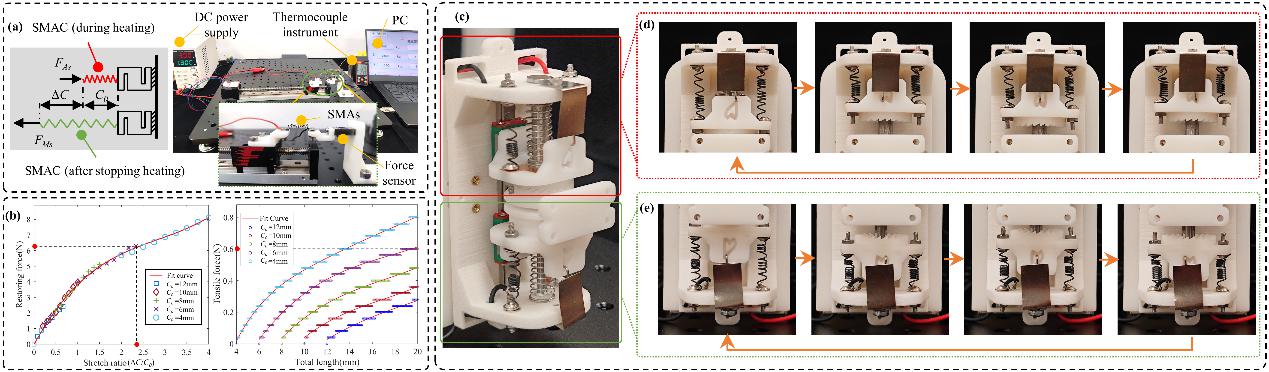
图3 SMA力学性能实验及关节样机原型
如图4所示,研究团队将提出的机器人运行模式分为三种:
1) 模式1-整段作业(S=1)
这种模式表示机器人以整个身体段作为独立运动单元,通过同步驱动控制的方式运动。
2) 模式2-分段作业(2≤S≤n-1)
在这种模式中,机器人从基座开始被划分为S段。每个关节段为独立运动单元,作业的灵活性得到有限放大。由于机器人仅设置了一组肌腱驱动单元,各关节段间需要通过分步驱动控制的方式运动。
3) 模式3-分节作业(S=n)
这种模式表示机器人以每个关节作为独立运动单元,其灵活性得到在该结构下的极限放大。驱动控制方式与模式2类似,不同的是驱动对象为单个关节。
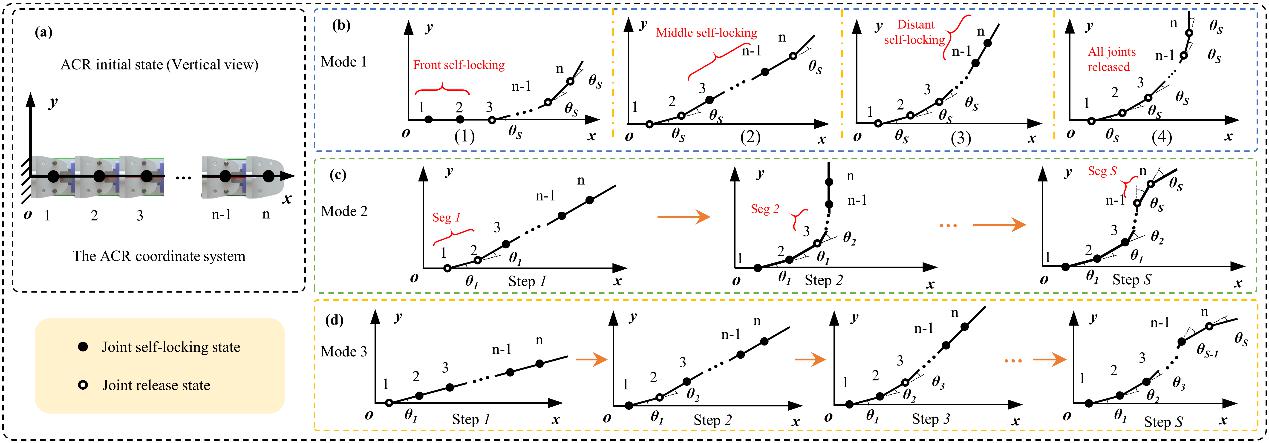
图4 机器人运行模式示意图
研究团队搭建了机器人样机,并针对该样机进行了工作空间分析,运动表现,运动误差及刚度测试实验,分别为:
(1) 根据关节自锁策略,机器人在不同的运行模式中展现了工作空间的多样性与灵活性,且随着关节段的数量增加其可达的工作空间范围越大。经对比表明,连续体机器人在拥有关节自锁功能后,其工作空间范围得到有效扩展。
(2) 研究团队测试了机器人样机在不同运行模式下的水平运动表现与运动误差,结果表明运动表现的正确性,并与运动学建模分析相一致。
(3) 在刚度实验中,研究团队通过实验证明了全部关节锁定时的机器人近似刚度约为全部关节释放时的8.51倍,说明当所有关节都锁定时,机器人可以不需要电机驱动来维持形状。
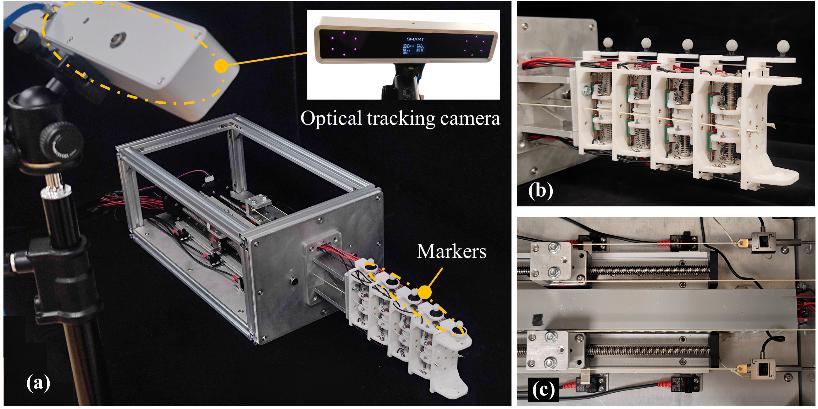
图5 机器人样机
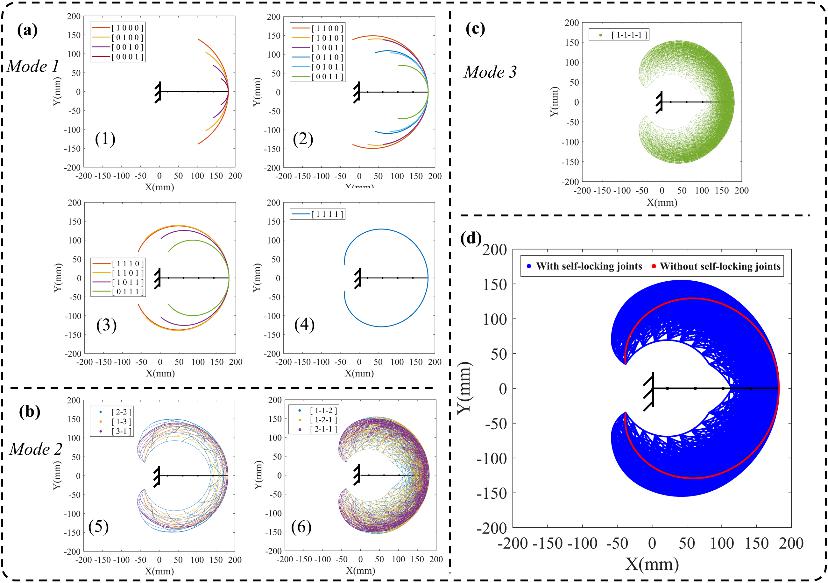
图6 工作空间分析
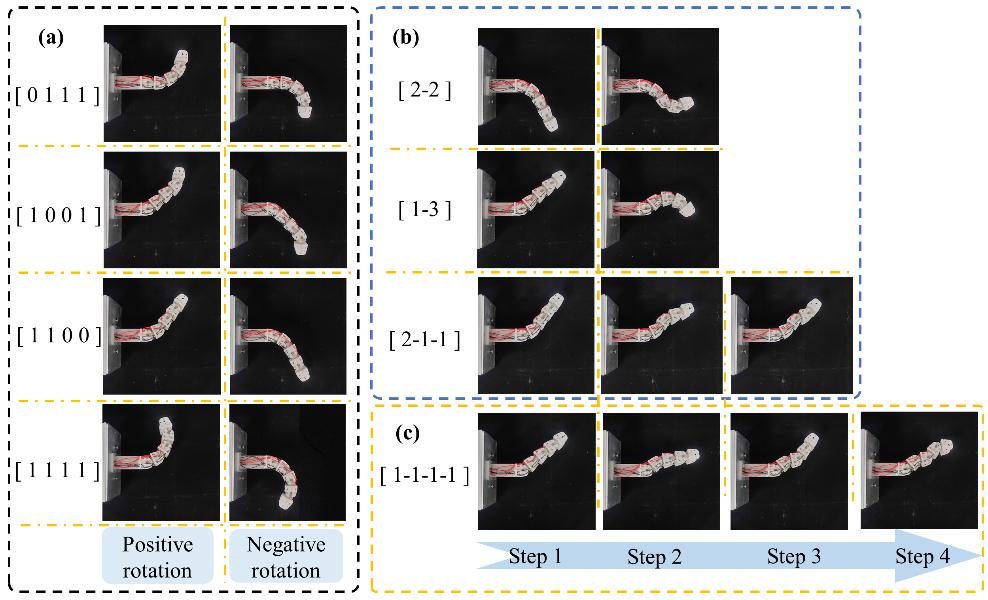
图7 机器人运动表现
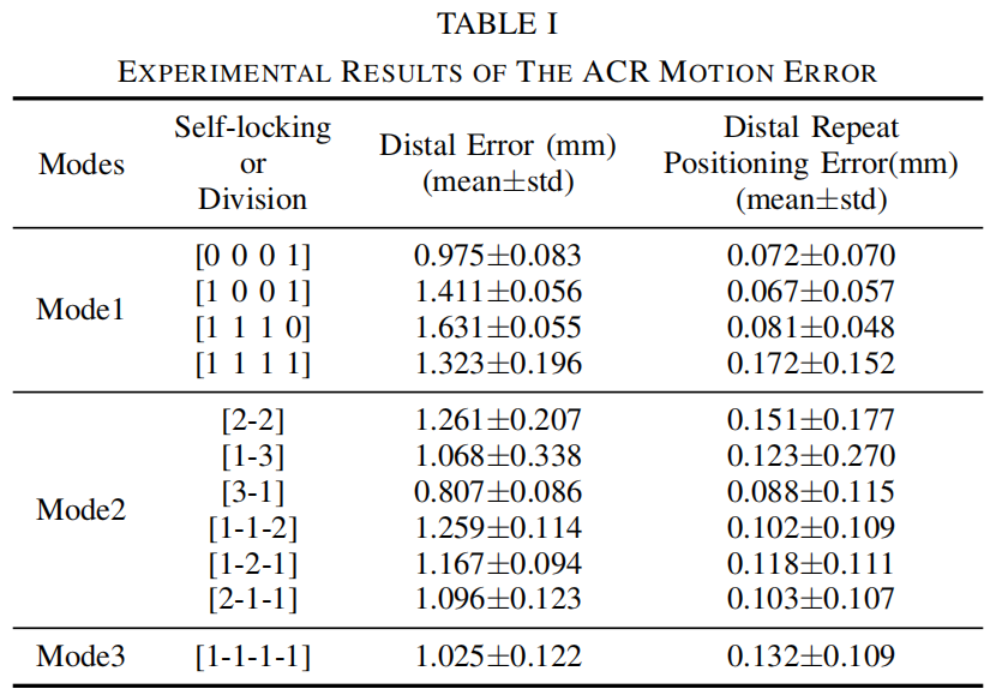
图8 机器人运动误差
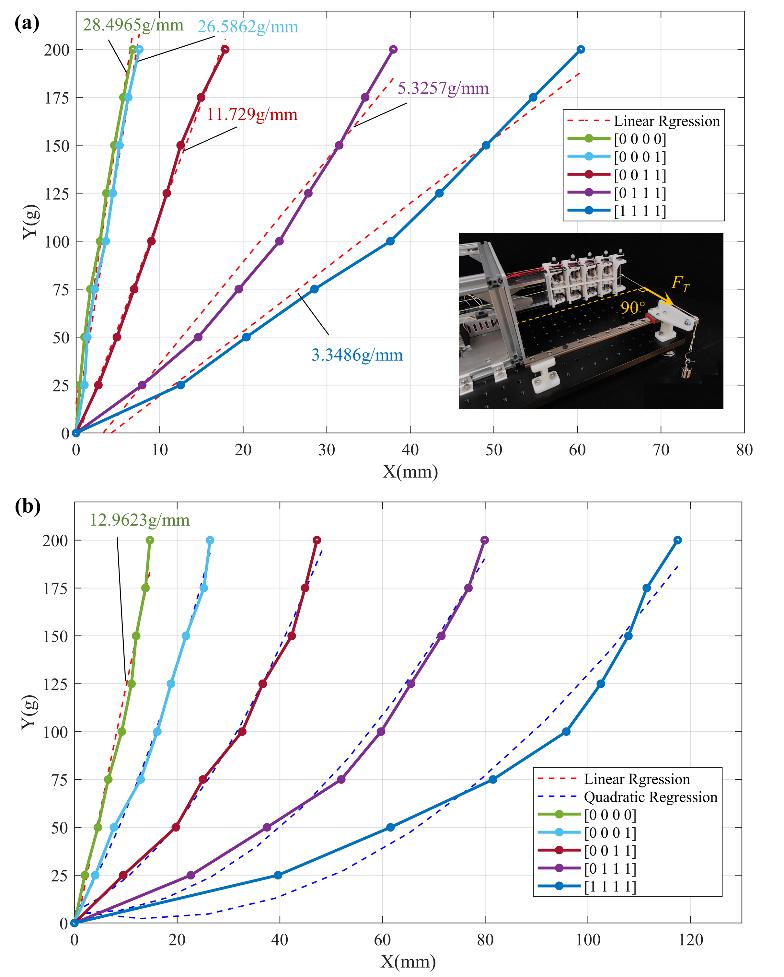
图9 机器人刚度实验
(2) Hierarchical Visual Policy Learning for Long-Horizon Robot Manipulation in Densely Cluttered Scenes
第一作者:21级直博生王鹤澄;通讯作者:齐立哲研究员
这项工作专注于解决密集堆叠工业场景中的长程物品打包任务。此类任务需要机器人操作策略来有效应对物体之间存在的严重遮挡,并根据视觉观察不断产生精确的动作。然而现有方法存在以下几个问题:
1. 假设不完整: 许多方法假设场景中的物体不被遮挡或已知物体的姿态,限制了它们在密集杂乱场景中的应用。
2. 效率低下: 一些方法依赖于反复地移除和放置物体来清理障碍物,导致效率低下且无法有效应对复杂的任务。
3. 规划不足: 部分方法采用隐式贪心策略来选择操作原语,而非显式规划,无法有效利用不同操作原语之间的协同效应,限制了方法的适应性和性能。
为了解决上述问题,本文提出了一种基于视觉的堆叠场景长程操作分层策略(HCLM)。它采用一个高级策略和三个选项来选择并实例化三个参数化动作原语:推动、抓取和放置。策略通过模仿学习和分层强化学习(HRL)进行训练。
本文的贡献在于:
1) 提出了一种基于视觉的堆叠场景长程操作分层策略(HCLM),通过协调推动、抓取和放置基元来精确完成打包任务。
2) 提出了两种启发式方法,SEQ 和 TSUS,以增强 Q 值更新并缓解 HRL 中的non-stationary transition问题。
3) 对多种堆叠场景长程打包任务与baseline进行了广泛的比较,验证了方法的有效性。
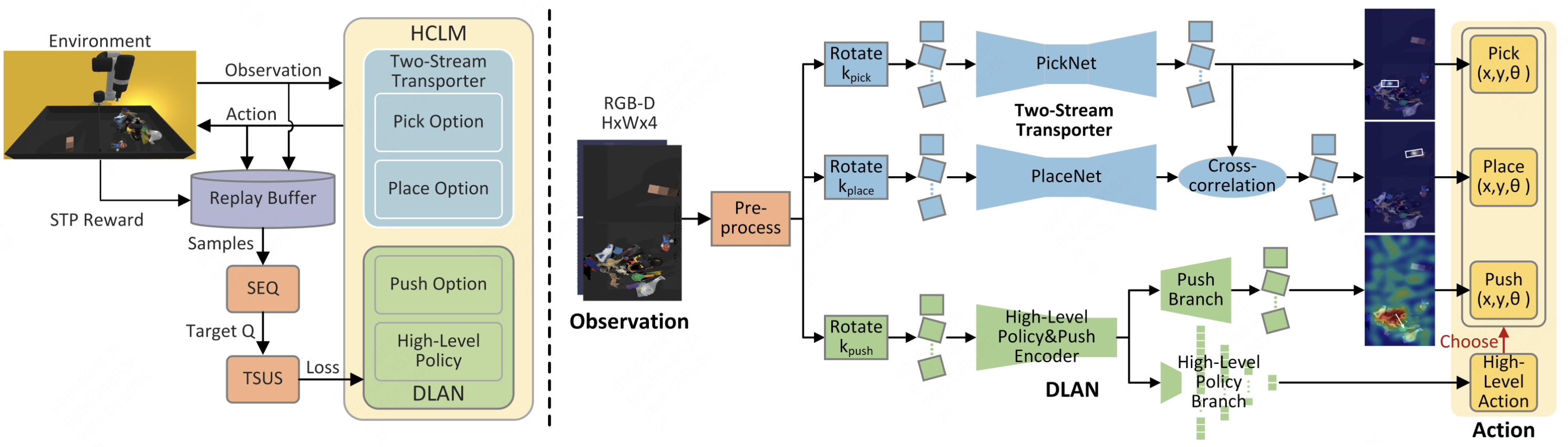
图1策略框架图
如图 1 所示,高级策略根据视觉观测输出高级动作,选择运动基元并执行,同时三个选项输出相应的运动基元参数。对于高级策略和推动选项,我们提出了一个双流双分支网络,用于同时建模两者,并利用分层强化学习进行训练。对于抓取和放置选项,我们提出一个类似的双流单分支网络分别建模抓取和放置选项,并通过模仿学习完成训练。
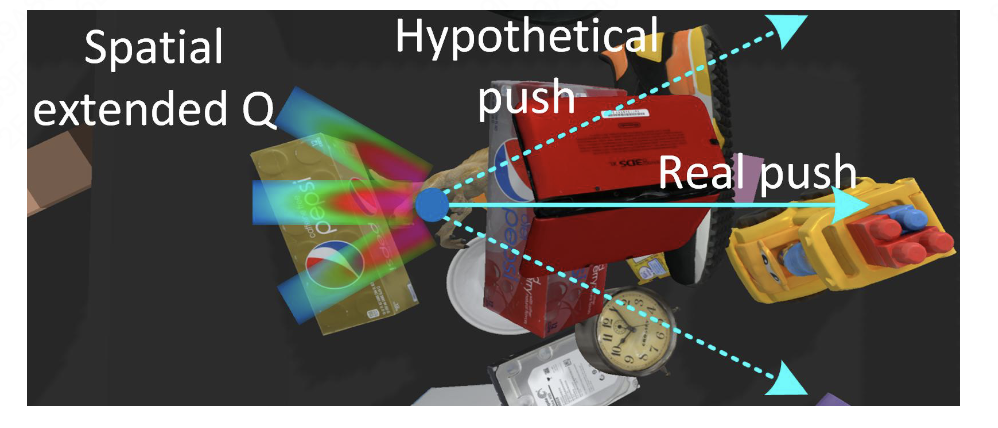
图2 空间扩展的Q值更新(SEQ)
由于推动基元动作具有方向性,其结果可能在临近区域内保持一致。因此,采用各向异性高斯分布来描述这种一致性,将 Q 值从单个像素扩展到一个区域。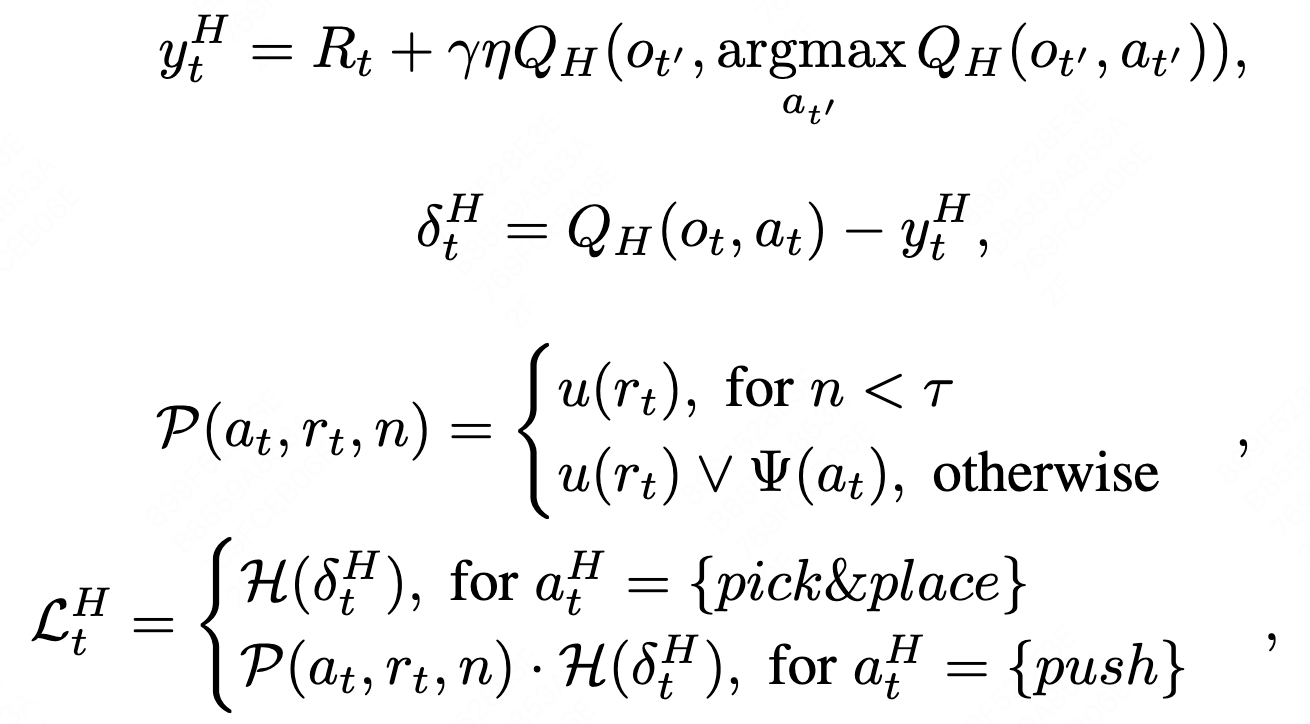
图3两阶段更新方法(TSUS)
为了缓解分层强化学习中的non-stationary transition 问题,我们提出了一种启发式方法,TSUS。具体来说,在训练的早期阶段,由于推动选项的输出不可靠,因此只使用成功的推动经验来更新高级政策。一旦训练进度超过阈值τ,我们假设推动选项可以产生合理的动作。因此使用所有非随机推动经验来更新高级策略。
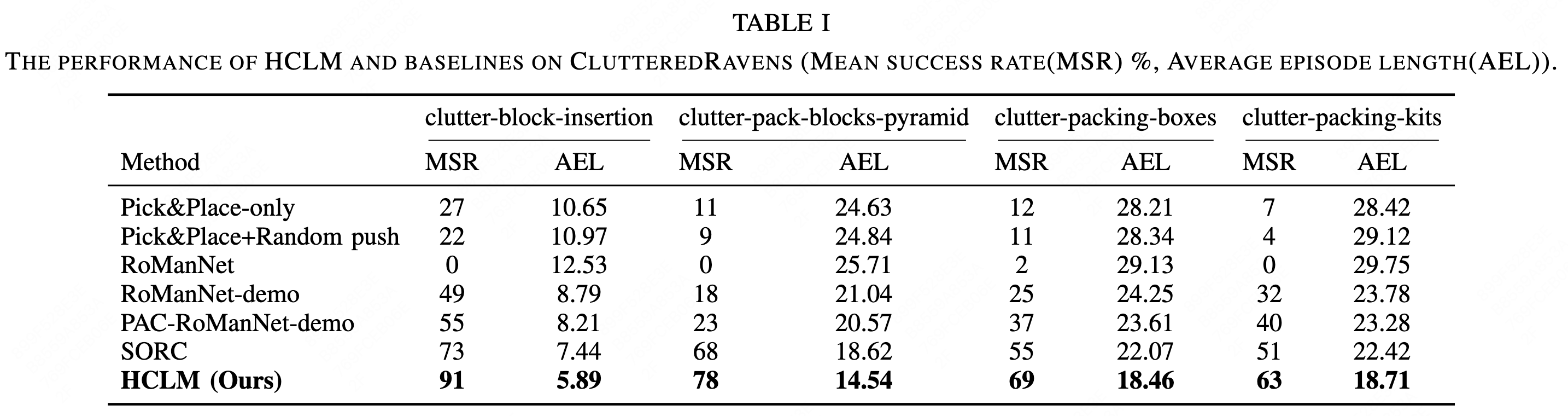
图4 实验结果
从图4的实验结果中可以看到,HCLM 在所有任务上的成功率和效率均优于基线方法。
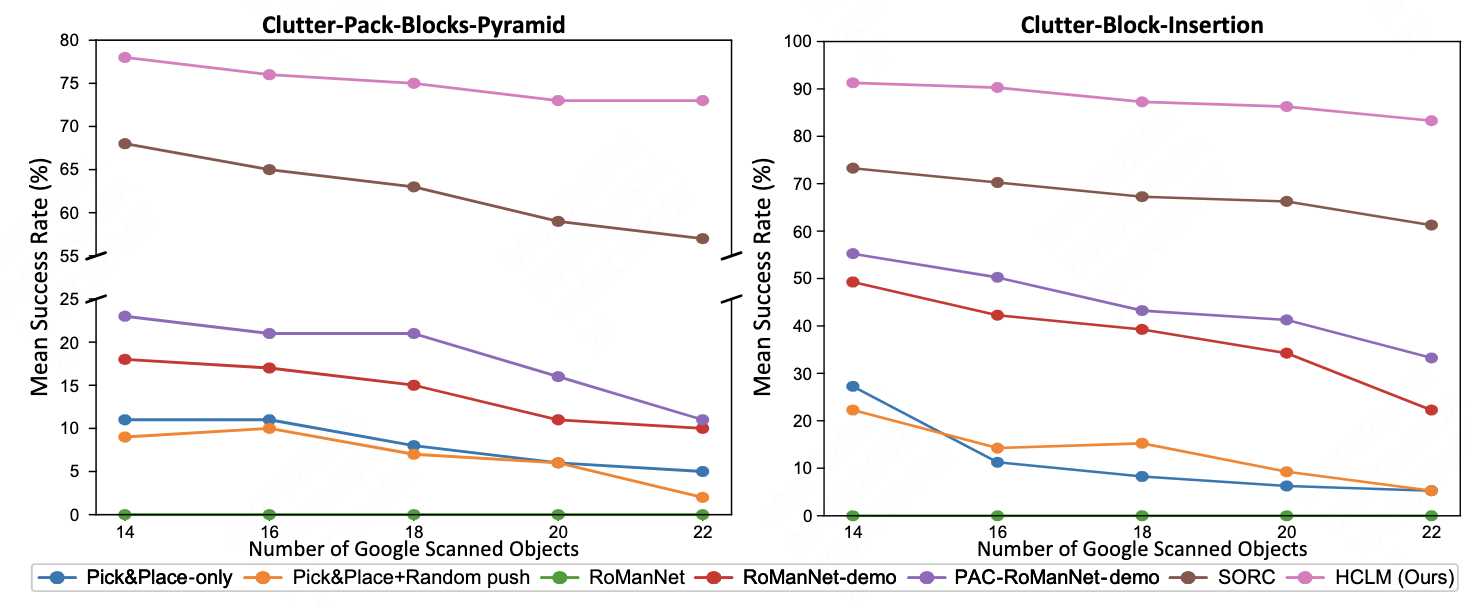
图5不同物体数量下方法的平均成功率
为了验证方法对于更加密集堆叠场景下的泛化性,我们逐步添加更多的任务无关物体。如图 5 所示,我们的方法在不同程度的堆叠场景下均表现出良好的泛化能力。
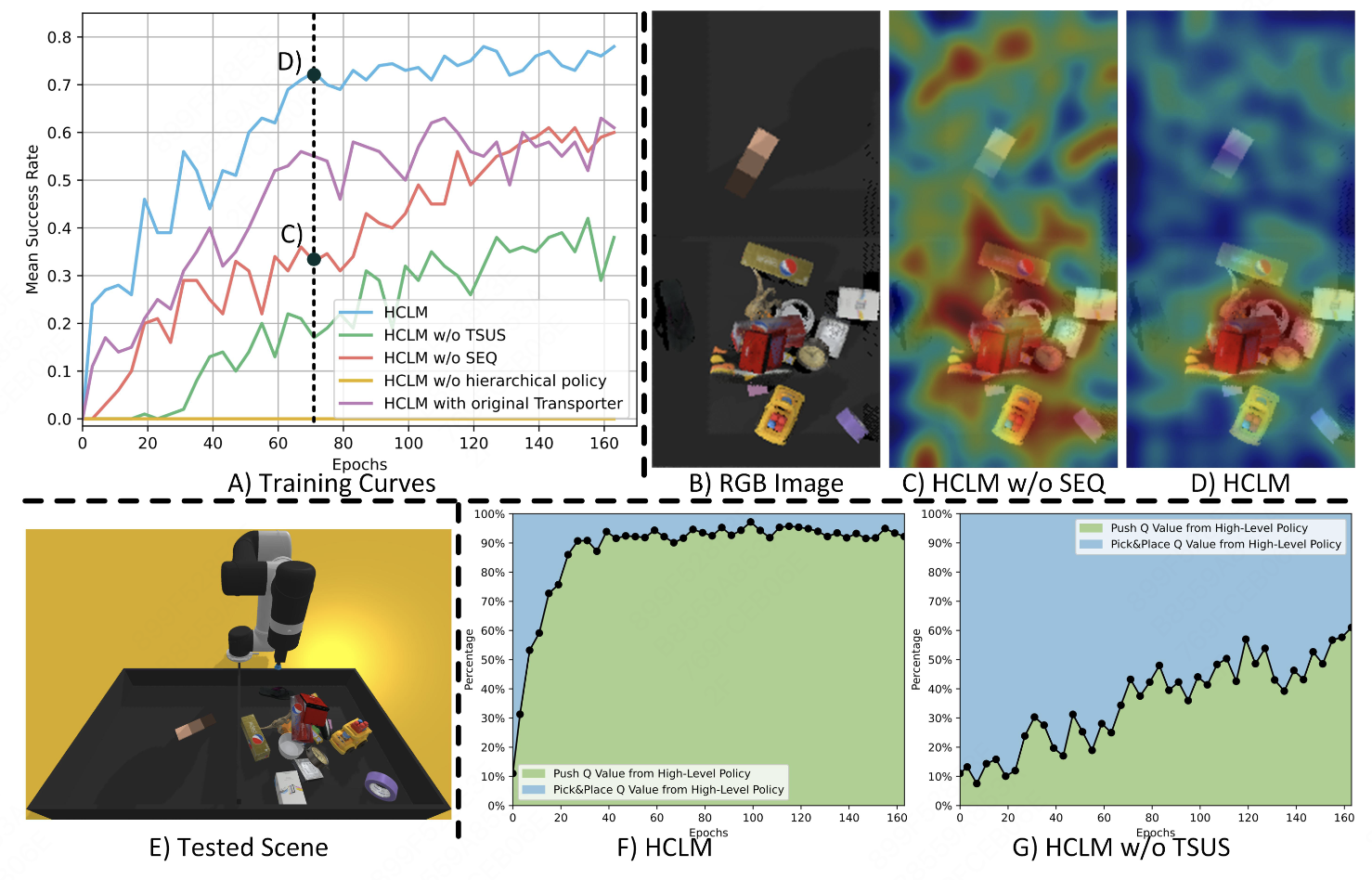
图6 SEQ 与 TSUS 对训练的影响
图6右上表明,SEQ 通过减少探索负担有效地加速了训练,并通过将推动动作集中在堆叠区域,提升了 HCLM 的性能。图6右下表明,在完整的HCLM中,高级策略在堆叠场景中迅速学会选择推动原语。在没有TSUS时,由于HRL中的non-stationary transition 问题,高级策略的学习速度显著降低,并妨碍其在堆叠场景中做出最优决策。
延伸阅读
智能工艺机器人与装备实验室致力于机器人极端作业环境智能感知,自主规划、柔性控制与先进结构设计研究,研制面向复杂且高质量作业任务的技能型机器人与装备。面向国家重大需求,构建了从“基础理论研究-瓶颈技术攻关-首台套产品研制-重大产业应用”的一体化创新体系,相关研究成果发表于CVPR、AAAI、ECCV、Transactions on Robotics、机器人、控制与决策等国内外顶级会议和期刊;荣获上海市技术发明奖一等奖、中国发明协会发明创新奖一等奖、第六届中国(上海)国际发明创新展览会金奖、上海发明协会2023高等院校发明选拔赛金奖、天津市科技进步奖二等奖等重要科技奖项;研制的大尺寸测量机器人、智能上甑机器人、柔性加工机器人已经在高铁、航空航天、文物修复、酿酒、制鞋制衣等领域实现产业化应用。
International Conference on Robotics and Automation (ICRA)是国际机器人和自动化顶级会议,并且是IEEE机器人与自动化学会的旗舰会议。该会议成立于1984年,每年举行一次。机器人技术、自动化技术、通信领域以及计算机领域的专家会一同参加,通过演讲与展示的方式分享并讨论机器人领域的最新工作。会议论文集将由IEEE出版社正式出版。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码