新闻动态



近期,工研院甘中学教授课题组集群机器人系统实验室(Multi-AGent robotIC systems Lab,简称‘MAGIC Lab’)在多机器人协同的柔性制造领域发表系列研究成果,分别被顶级国际期刊《IEEE transactions on Industrial Informatics》(影响因子11.7)和《Journal of Industrial Information Integration》(影响因子10.4)录用。复旦大学工研院博士管宇翔为论文第一作者,甘中学教授与欧阳春青年副研究员为共同通讯作者,研究成果受上海市人工智能重大专项支持。
论文简介:
面向个性化制造的协同制造系统已成为工业4.0的关键组成部分,并得到了工业信息集成工程(IIIE)应用的支持。协同制造任务中,多智能体的高效调度至关重要,直接影响工厂的运营效率。协同制造领域有两个重要的研究方向:1)柔性制造排程,2)柔性物料运输。
在第一个方向上最具突出的优化问题之一是具有多处理器任务的混合流车间调度问题(HFSPMT)。文章《Hybrid flow-shop scheduling in collaborative manufacturing with a multi-crossover-operator genetic algorithm》提出了一种改进的遗传算法,称为多重交叉算子遗传算法(MCO-GA),该算法框架如图1所示。MCO-GA引入了一种新型交叉算子,命名为SX,该算子在收敛效率上优于经典的交叉算子。此外,MCO-GA在交叉阶段采用概率选择方法,能够自主选择经典交叉算子或SX。通过成功应用MCO-GA解决现实生活中的木材制造工厂(图2)调度问题,验证了其有效性。与最先进的元启发式算法(HSA、OBL_HSA和MGLS)进行比较,结果显示,MCO-GA在60%以上的实例中实现了显著更好的平均结果。
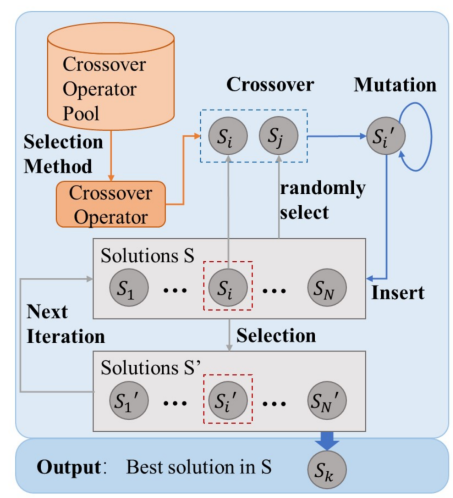
图1. MCO-GA算法框架
此外,MCO-GA在计算时间上优于OBL_HSA和MGLS。这些结果突显了MCO-GA在解决HFSPMT问题上的有效性与高效性,并展示了其在提升协同制造系统调度与协调方面的潜力。
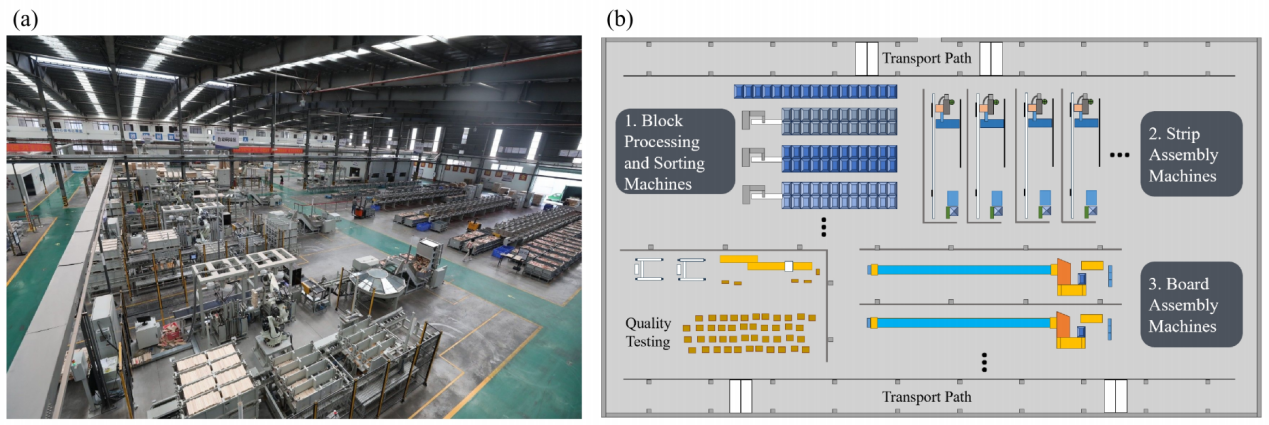
图2. 木料加工厂内部布局
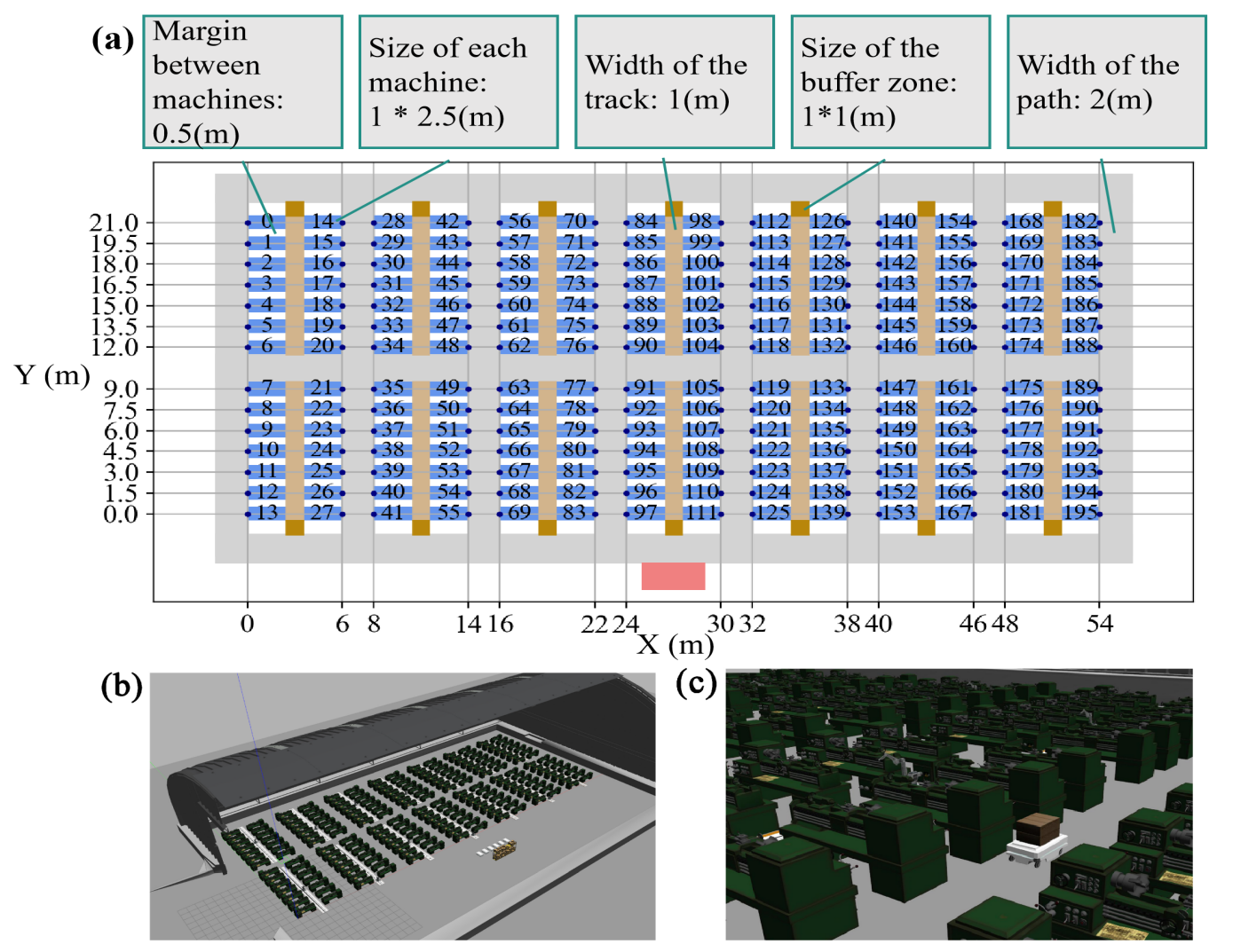
图3. 工厂内的物流运输场景
对于协同加工的第二个研究方向,即大规模复杂物流系统的物料运输调度,其主要的研究点是动态多周期车辆路径问题(DMPVRP)。文章《Real-Time Scheduling Framework for Multi-Agent Cooperative Logistics with Dynamic Supply Demands》中所展开的研究对DMPVRP模型进行了优化,以更好地符合实际场景特征,同时能够更好地反映工厂内的物流运输环境(图3)。该文提出了一种多智能体动态调度(MADS)框架,以适应动态环境变化并进行及时调整,该框架(如图4所示)包括两个模块:动态路径规划和均匀任务分配,框架示意图。第一个模块利用自设计的多算子两阶段进化算法动态更新车辆的路线。第二个模块则实时保持车辆之间的工作负载平衡。实验结果表明,所提算法相比三种最先进的算法,在机器输出方面提高了20%,并且运输成本降低了5%。此外,结合轮胎钢帘线制造厂的案例研究,进一步展示了该算法应对实际制造任务的有效性与鲁棒性。
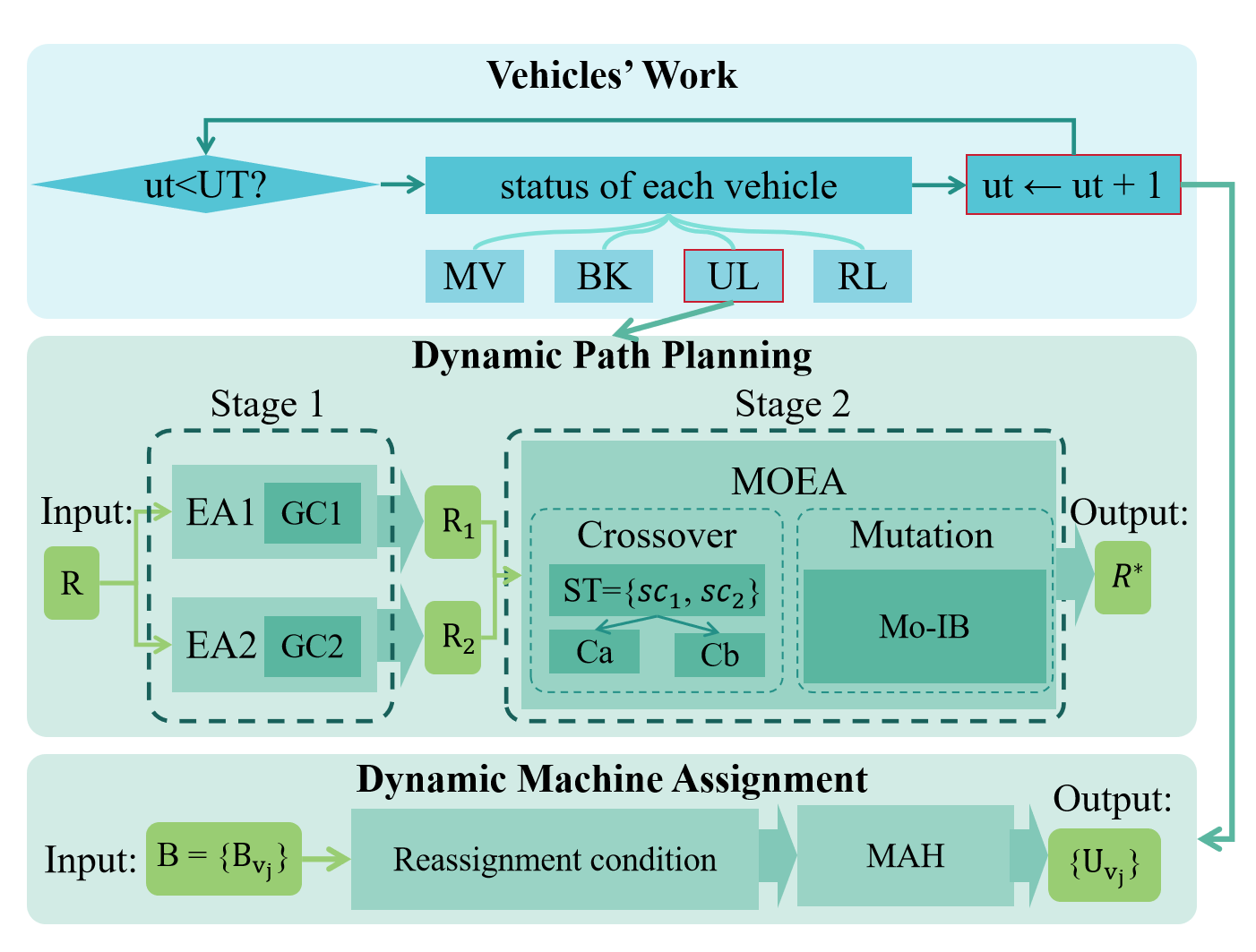
图4. MADS算法框架
延伸阅读:
《Journal of Industrial Information Integration》为SCI一区期刊,聚焦于工业向集成化和信息化转型的主题。该期刊旨在推动和传播工业信息集成领域的最新进展,分享关于工业集成和工业信息化相关的挑战、问题和解决方案。
《IEEE transactions on Industrial Informatics》为SCI一区Top期刊,该期刊聚焦于基于知识的工厂自动化,旨在提升工业制造和生产过程。期刊涵盖了智能与计算机控制系统、机器人技术、工厂通信与自动化、灵活制造、视觉系统以及数据采集与信号处理等领域的最新发展。
MAGIC Lab,是复旦大学工研院智能机器人研究院和智能机器人教育部工程研究中心的主要研究团队之一,复旦大学工研院副院长、智能机器人研究院院长甘中学教授为实验室首席PI。MAGIC Lab主要依托上海市人工智能市级重大专项,面向国家《新一代人工智能发展规划》中的群体智能理论、自主协同控制与优化决策理论、群体智能关键技术等重要科学方向,融合非线性动力学、模式识别、计算神经科学、强化学习、集群智能等多领域的理论与方法,重点探究人机物协同与智能融合的科学原理,突破异构群体行为协作与动态演变的关键技术,构建智慧交通与智能制造等场景下的异构集群交互系统。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码