新闻动态



2023年11月,工研院甘中学教授课题组集群机器人系统实验室(Multi-AGent robotIC systems Lab,简称‘MAGIC Lab’)在人工智能国际顶级期刊(Expert Systems with Applications,简称‘ESWA’)上发表群体机器人领域的最新研究成果。复旦大学工研院2021级直博生周子清为第一作者,甘中学教授与欧阳春博士为共同通讯作者,发表题为《A Framework for Dynamical Distributed Flocking Control in Dense Environments》的学术论文。
论文简介:
自然界中的生物种群常常作为群体机器人控制的仿生对象,然而现有的基于Reynolds三原则的集群模型无法满足密集环境下(包含静态和动态障碍物)群体机器人对于安全性和有序性的要求。为解决以上问题,本文提出了一种全新的群体机器人动态优化控制框架(图1),其融合了改进的可变参数自驱动集群控制模型和增强的动态粒子群优化(DPSO)算法。集群模型融合了基于概率的鸽群启发的避障策略,以优化群体机器人的转向决策,并提出一种新的动态群智能优化算法(PSO-FOHE),其结合了基于协作的粒子群优化器和包含历史引导的分数阶速度项,能够在高频变化的环境中找到更优的解。
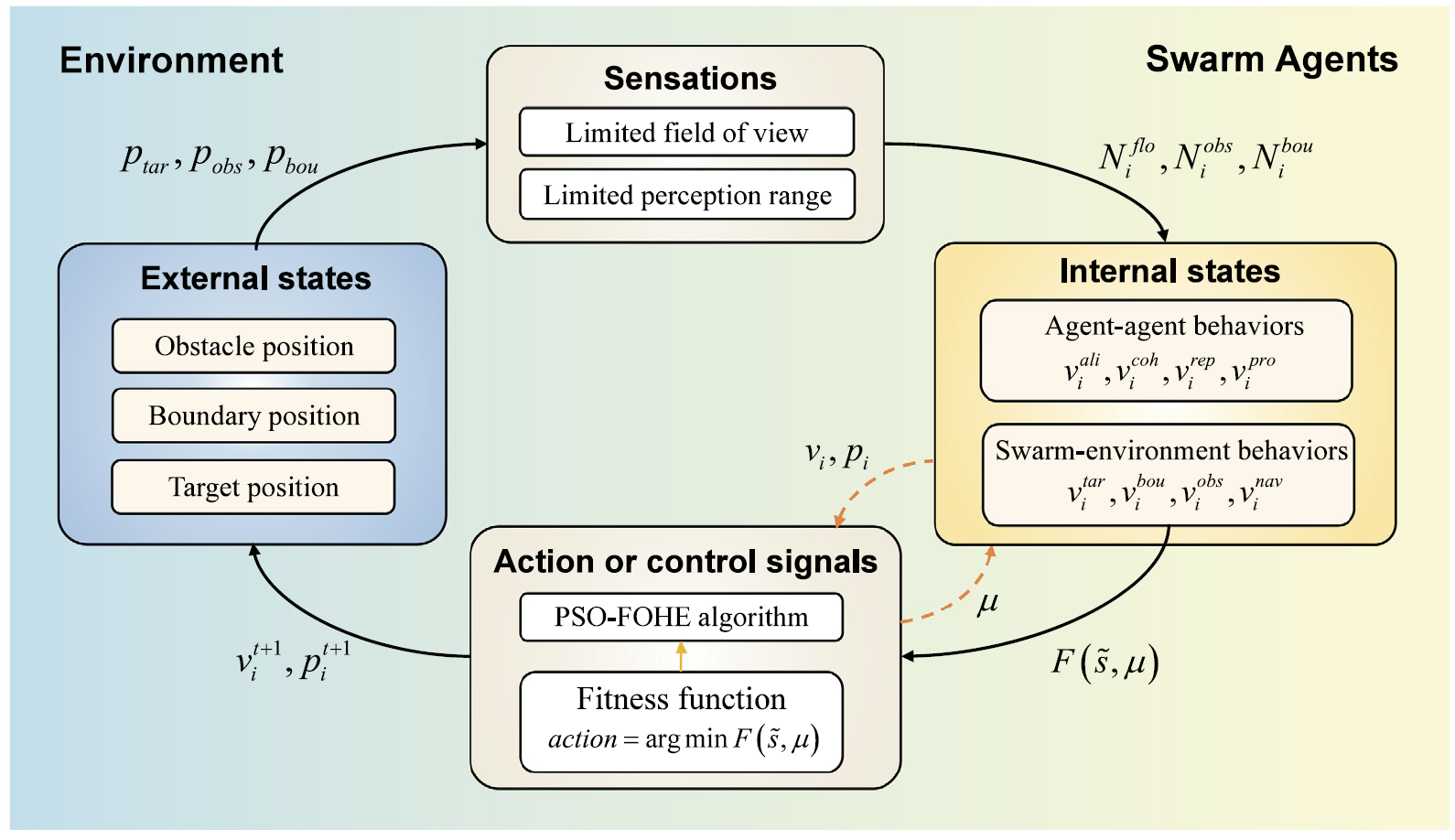
图1 集群动态优化控制框架图
受脑科学中的最小自由能原理启发,我们设计了基于集群自由能状态的(熵)适应度函数,群体的运动无序性或者任何的碰撞都会导致适应度值的增加。为了让集群一直保持在最小自由能状态,本文所提出的动态优化框架可以实时地求解出群体机器人的最佳控制参数组,以维持期望的群体形态并避免碰撞。通过设计静态密集场景(图2),障碍物陷阱场景和动态密集场景(图3),我们的方法与最先进模型相比,可以在没有环境先验信息和有限的局部视野下,展现出更强的群体安全性、同步性和运动效率。此外,还通过实验验证,我们的模型具有优异的拓展性和鲁棒性。
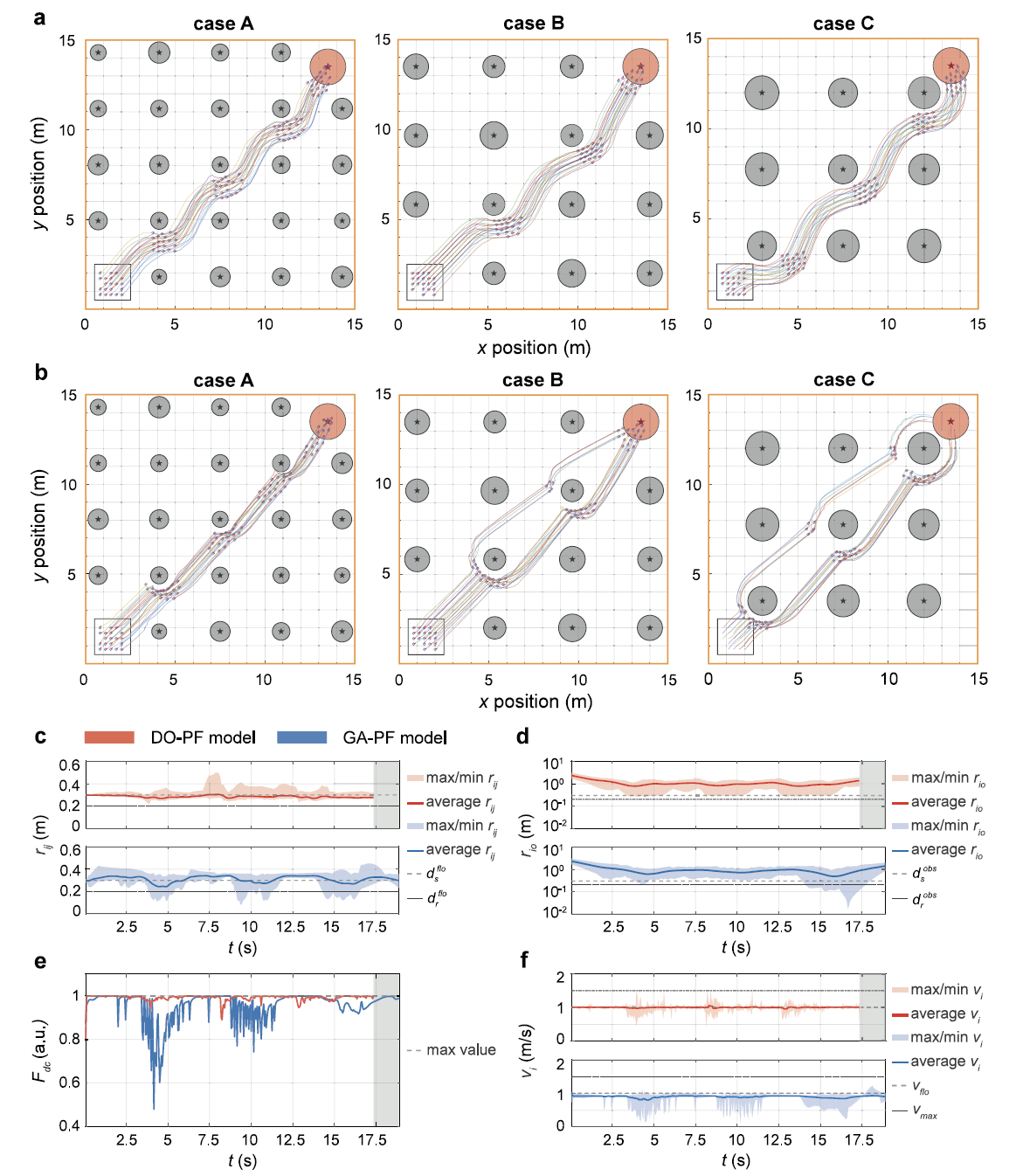
图2 静态密集场景下群体模型的运动轨迹和运动指标对比
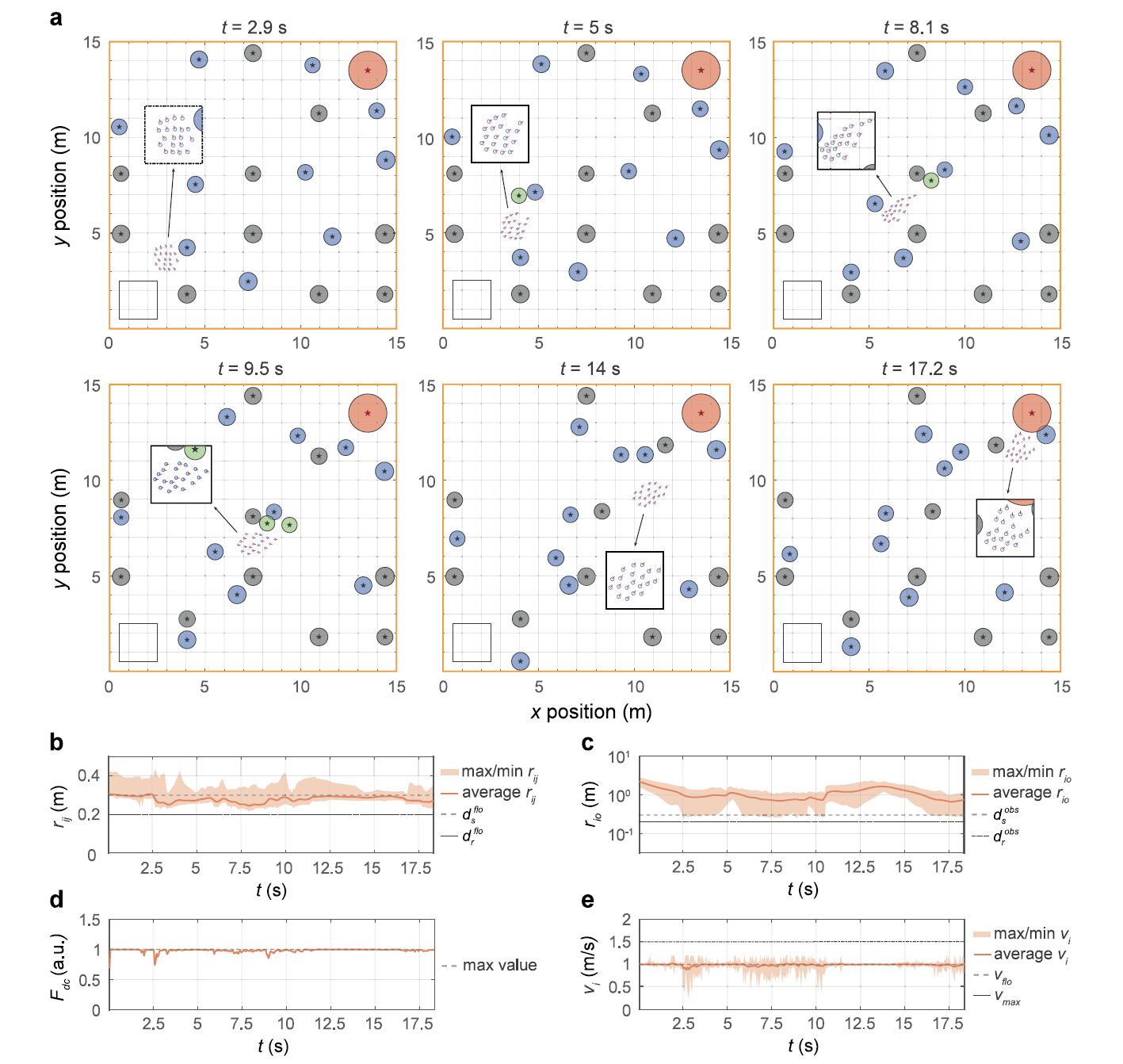
图3 动态密集场景下本文提出的群体模型的运动轨迹和运动指标展示
原文链接:https://www.sciencedirect.com/science/article/pii/S0957417423031962
延伸阅读:
《Expert Systems with Applications》由Elsevier出版,是国际公认的人工智能领域顶级期刊,重点专注于智能系统的研究,为中科院分区计算机科学一区Top期刊,中国自动化学会推荐科技期刊目录A类期刊。
MAGIC Lab,是复旦大学工研院智能机器人研究院和智能机器人教育部工程研究中心的主要研究团队之一,复旦大学工研院副院长、智能机器人研究院院长甘中学教授为实验室首席PI。MAGIC Lab主要依托上海市人工智能市级重大专项,面向国家《新一代人工智能发展规划》中的群体智能理论、自主协同控制与优化决策理论、群体智能关键技术等重要科学方向,融合非线性动力学、模式识别、计算神经科学、强化学习、集群智能等多领域的理论与方法,重点探究人机物协同与智能融合的科学原理,突破异构群体行为协作与动态演变的关键技术,构建智慧交通与智能制造等场景下的异构集群交互系统。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码