新闻动态



近日,复旦大学工程与应用技术研究院(简称工研院)仿生结构与机器人实验室(BSRL)在数据驱动动力学建模领域的最新研究成果——题为《A neuro-fuzzy network modeling method for uncovering the dynamic properties of time-varying systems》(一种揭示时变系统动力学特性的模糊神经网络建模方法)的学术论文在机械工程领域的国际权威学术期刊《Mechanical Systems and Signal Processing》(中科院工程技术1区TOP)上发表。复旦大学工研院为第一完成单位和通讯单位,博士后刘作林为论文第一作者,方虹斌青年研究员为通讯作者。该研究工作对22年提出的模糊神经网络建模方法(发表于《IEEE Transactions on Fuzzy Systems》)进行了拓展并将其应用到多种时变系统的建模上。
论文简介
非稳态信号在各个领域和应用中经常遇到。用时变系统对非稳态信号进行建模,对于理解其基本信息和揭示其动力学特性至关重要。复旦大学工研院方虹斌青年研究员、徐鉴教授和刘作林博士提出了一种基于模糊神经网络的方法,用于建立非稳态信号的时变自回归(TVAR)模型。通过将时变参数表达为一组局部线性模型和有效性函数,TVAR系统被转化为一个等效的模糊神经网络。TVAR系统的模型结构和时变参数分别对应于等效神经网络的网络结构和权重,并可以通过模型数训练等来确定。通过对几个非稳态信号的建模,包括脑电波和雷达波,验证了方法的有效性。此外,该方法不仅适用于具有完测量的时变系统,也适用于不完测量的情况。最后将该方法应用于时变折纸管结构在外部激励下输出的振动信号,通过时频谱证明了所提方法的高时频分辨率,揭示了时变折纸管结构的固有力学特性和潜在的动力学行为。
本文主要工作
对于非稳态信号,研究采用时变自回归(TVAR)模型来进行模拟。利用一组局部线性模型和有效性函数对TVAR模型中的时变参数进行展开,得到等效的模糊神经网络。通过决策树算法对网络进行优化实现时变自回归模型提取和参数识别。算法的流程图见图1.
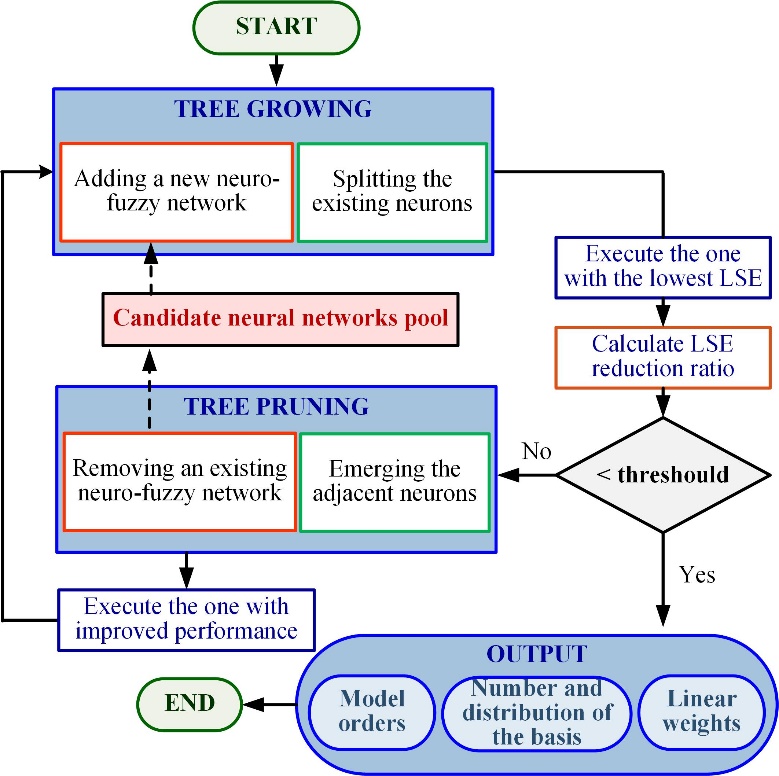
图1 基于模糊神经网络的算法流程图
依据该方法,成功建立了脑电波和雷达波(图2,左)信号的TVAR模型,对该模型采用时间相关的谱函数分析可以精确的得到这些非稳态信号的时频图(图2,右),可以看到,该方法不仅能精确定位频率的突变时刻,而且适用于多频率成分重叠的信号分解。
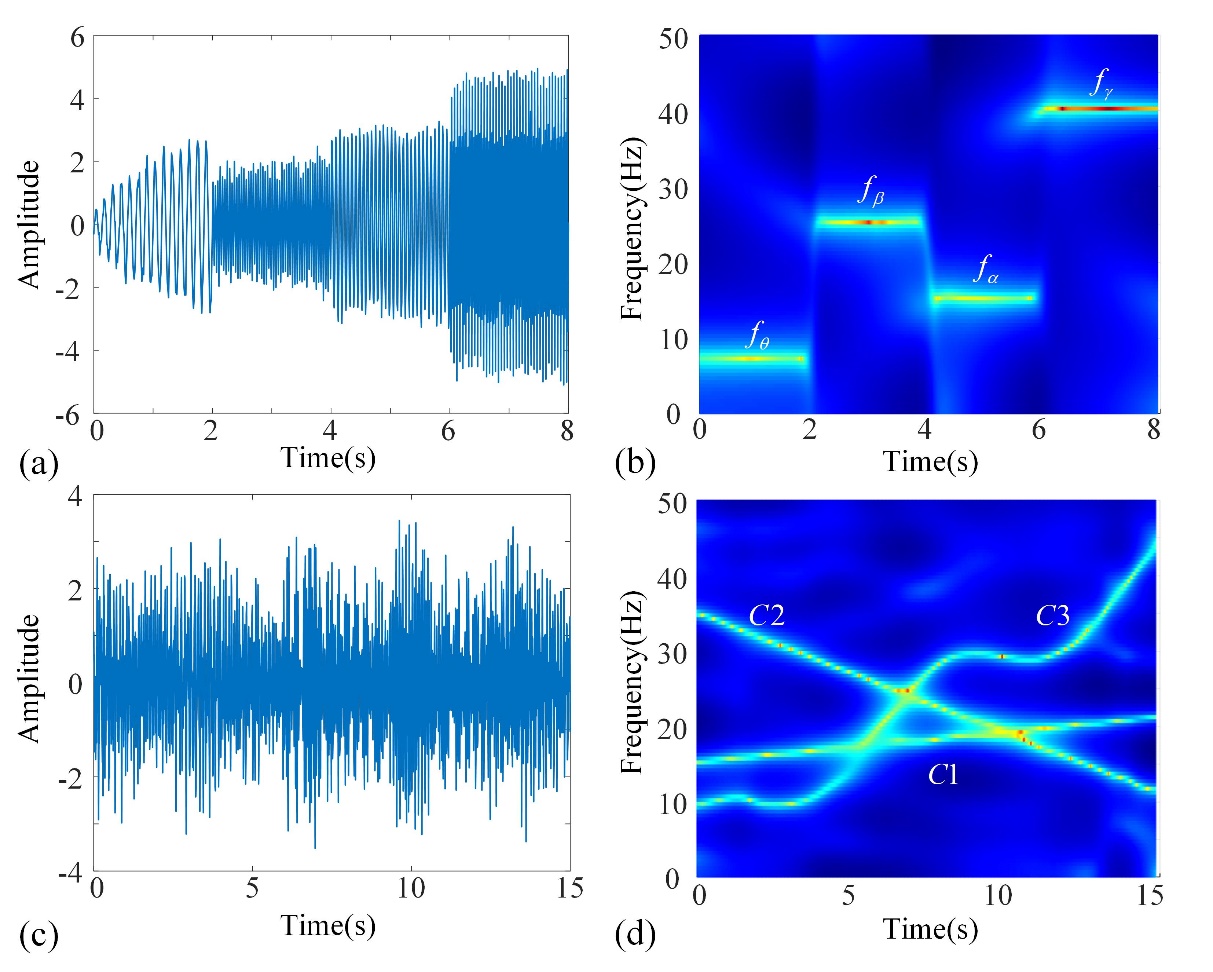
图2 依据该方法对脑电波信号和雷达波信号进行时频分析
对于多自由度时变系统,例如一个三自由度的弹簧质量系统(图3(a)),分别考虑了三个信号都可测量和仅某一个信号可测的情况,应用该方法,在这两种情况下都可以成功识别结构固有频率随时间的变化规律.
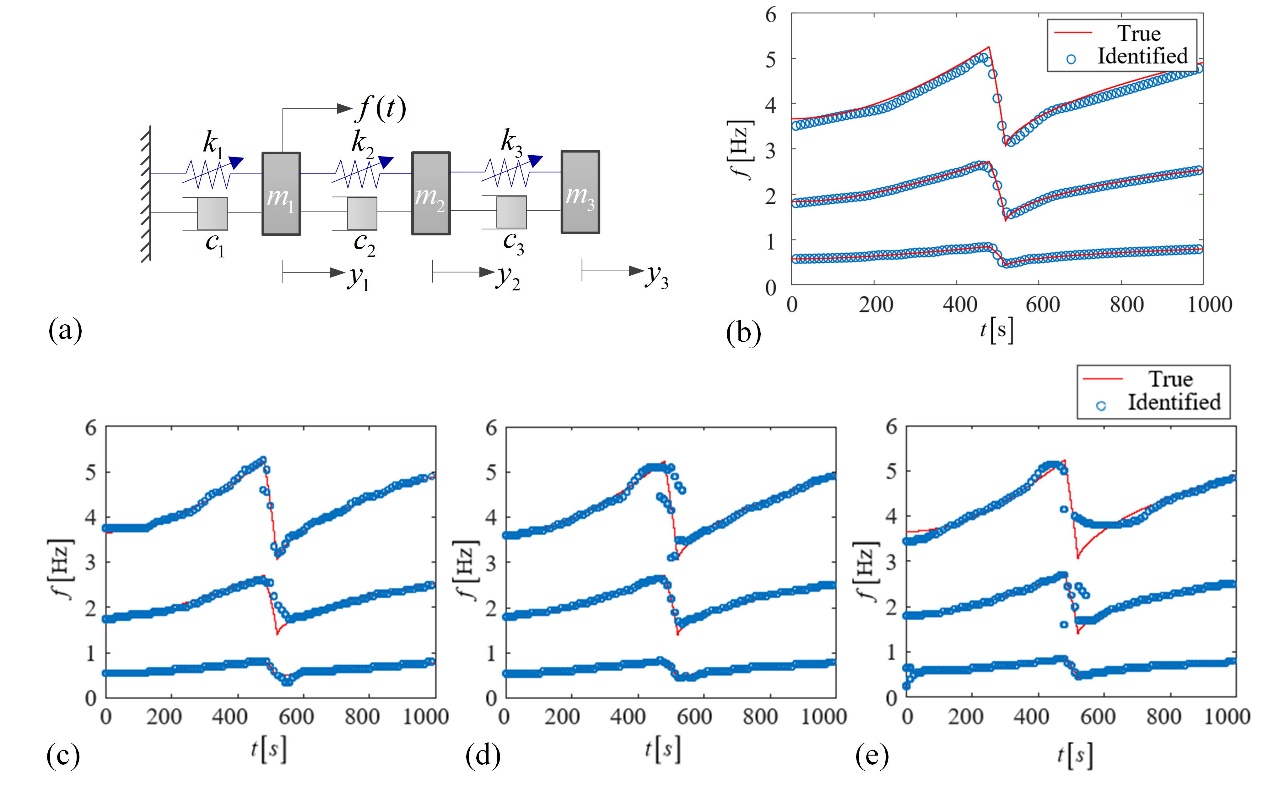
图3 依据该方法对三自由度时变系统进行固有频率识别。(b)利用三个采集信号的识别结果和真实值的对比;(c-e)仅用一个采集信号的识别结果和真实值的对比。
最后,采用双材料3D打印技术制备了Miura折纸管结构,其展开程度受内部形状记忆合金丝温度控制。作动不同的形状记忆丝到不同的温度,Miura折纸管结构的振动响应呈现出非稳态的特征,其对应的功率谱密度表现出宽频的特性,无法揭示结构特性和参数随时间的变化规律。
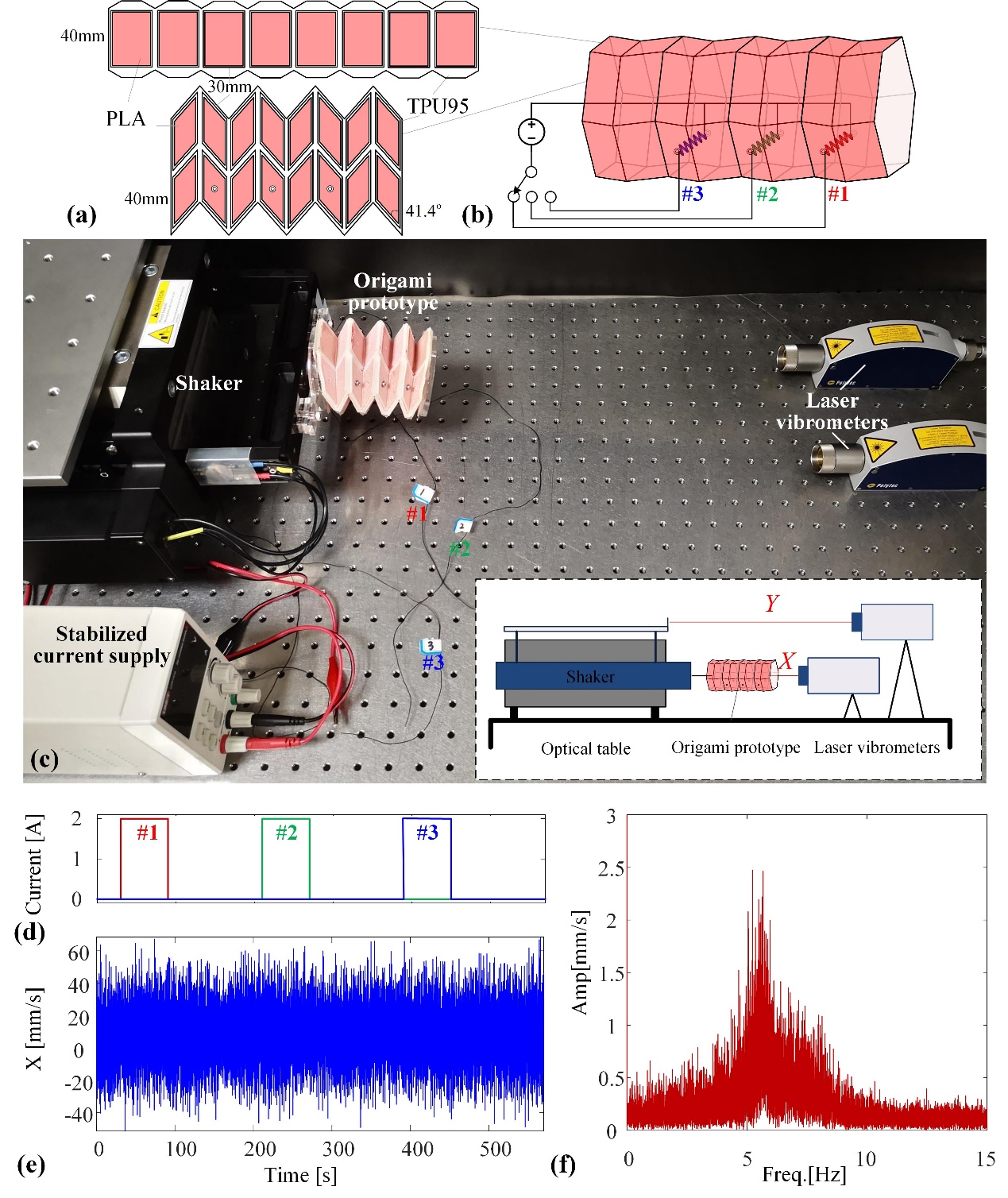
图4 Miura折纸管结构的制作过程和振动实验
应用提出的方法,可以准确得到Miura折纸管结构的固有频率随形状记忆合金作动的变化规律。特别地,通过对比发现,固有频率的突变点和结构内部形状记忆合金加热时刻十分吻合,而且在加热和冷却期间的变化趋势以及稳定后的相对大小都和理论预期相符,这说明该方法可以很好的揭示时变折纸管结构的固有力学特性和潜藏的内部形状记忆合金的变化规律。基于传统的非稳态信号处理方法,例如短时傅里叶变换(STFT)、连续小波表换(CWT)、小波包变换(WPT)、 灵活解析小波变换(FAWT)也可以得到信号的时频特征,然而其分辨率和准确程度却远低于本文提出的方法(图5)。
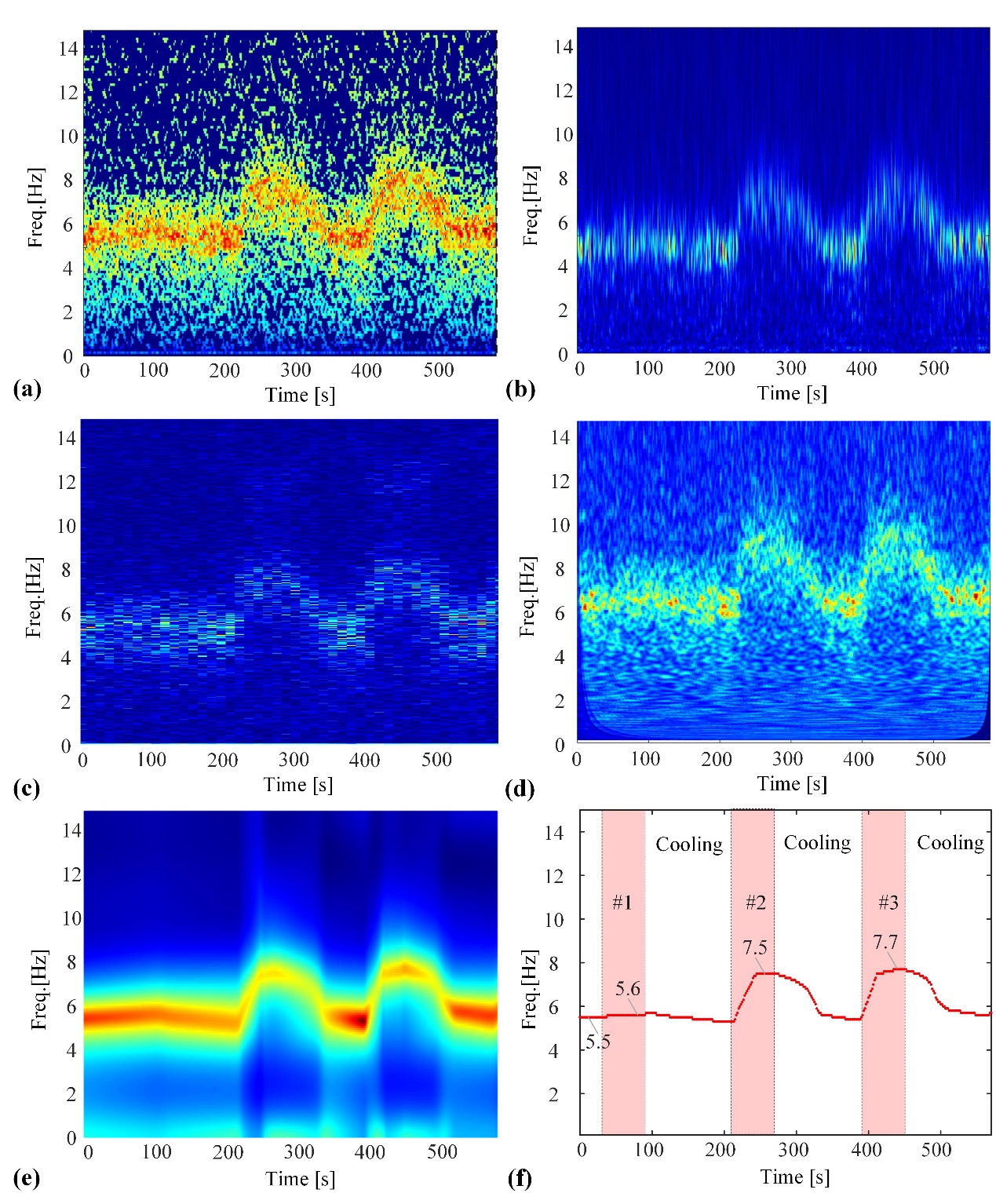
图5 应用(a) STFT, (b)CWT, (c)WPT, (d)FAWT和(e-f)本文提出的方法得到的时频图
该研究工作受到了国家重点研发计划“智能机器人”重点专项、国家自然科学基金重点项目、上海市 “科技创新行动计划”启明星项目和博士后科学基金的资助。
原文链接:https://doi.org/10.1016/j.ymssp.2023.110176
相关系列研究:https://doi.org/10.1109/TFUZZ.2020.3034972
延伸阅读:
仿生结构与机器人实验室(BSRL)隶属于复旦大学工程与应用技术研究院智能机器人研究院,由徐鉴教授和方虹斌青年研究员领导,主要研究方向为:
*具有超常规静力学、运动学和动力学性能的仿生结构和仿生机器人开发。
*基于可变结构和多驱动器的仿生多模态、模块化机器人的协同驱控。
*仿生移动机器人对可变工作环境的自适应与共融动力学。
*基于数据驱动技术的仿生机器人系统建模、在线辨识和最优化控制。
*基于可变拓扑结构的仿生机械超材料力-光-电-声多场耦合动力学。
实验室围绕“仿生结构与机器人”这一主题开展了交叉创新研究,相关学术成果发表在Advanced Materials、Advanced Science, IEEE Transactions、International Journal of Robotics Research, Journal of the Mechanics and Physics of Solids、Mechanical Systems and Signal Processing、《力学学报》等国内外顶级期刊与国际学术会议。
地址:上海市杨浦区邯郸路220号 邮编:200433 电话:(86)021-65642222
Copyright©2016复旦大学版权所有 沪ICP备:16018209
 工研院二维码
工研院二维码
 研究生会二维码
研究生会二维码